IMU User Guide revision 3.1 SMC Ship Motion Control www.shipmotion.eu
4.2.26 TSS1
Available from firmware 1.92
The default SMC pitch rotation direction definition differs from TSS1 format definition. By this reason
the axis inversion checkbox for Pitch must be ticked to have the correct rotational direction as per
the TSS1 string definition, where positive Pitch is bow up. Use the SMC IMU Configuration Software
to change the inverted Pitch if required. As default when selecting the TSS1 string the configuration
software will tick the checkbox for the pitch axis inversion.
Note: When settling, in addition to having the status flag 'U'; roll, pitch and heave will be 0.
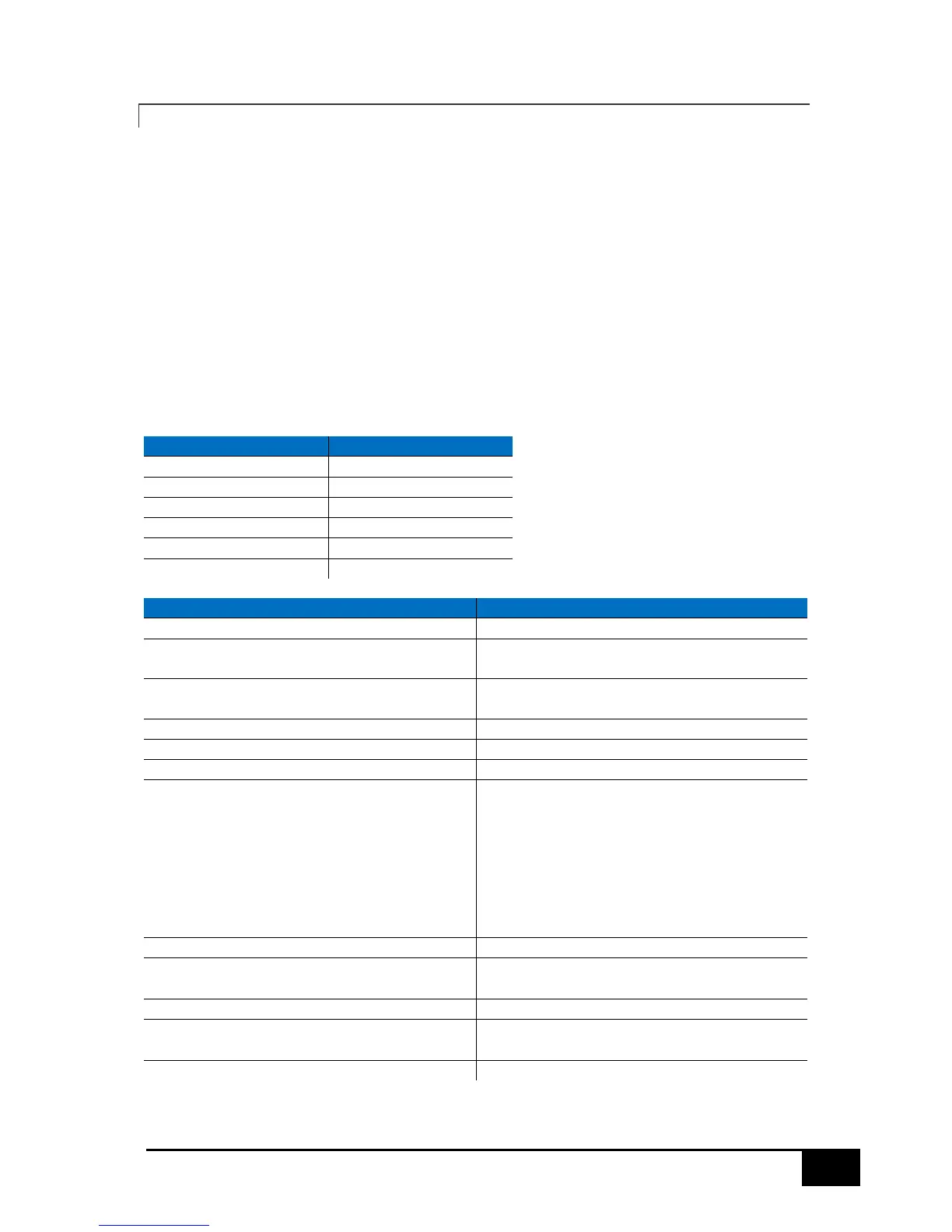
Data Frame
:XXAAAASMHHHHQMRRRRSMPPPP<CR><LF>
Example
:05FEFF 0000H 0102 -0049
Horizontal Acceleration (XX)
Hexadecimal value, unit is 3.83cm/s
2
in the
range 9.81m/s
2
Vertical Acceleration (AAAA)
Hexadecimal value, unit 0.0625cm/s
2
in the
range -20.48 to +20.48m/s
2
M = space if positive, - if negative
‘U’ Unaided mode Running
‘u’ Unaided mode Startup
‘G’ GPS Aided mode Running
‘g’ GPS Aided mode Startup
‘H’ Heading Aided mode Running
‘h’ Heading Aided mode Startup
‘F’ Full Aided mode Running
‘f’ Full Aided mode Startup
M = space if positive, - if negative
Roll ±90° units hundredths of degrees
(+ve=port up)
M = space if positive, - if negative
Pitch ±90° units hundredths of degrees
(+ve=bow up)

 Loading...
Loading...