TOPVERT S1 Series
E-
23
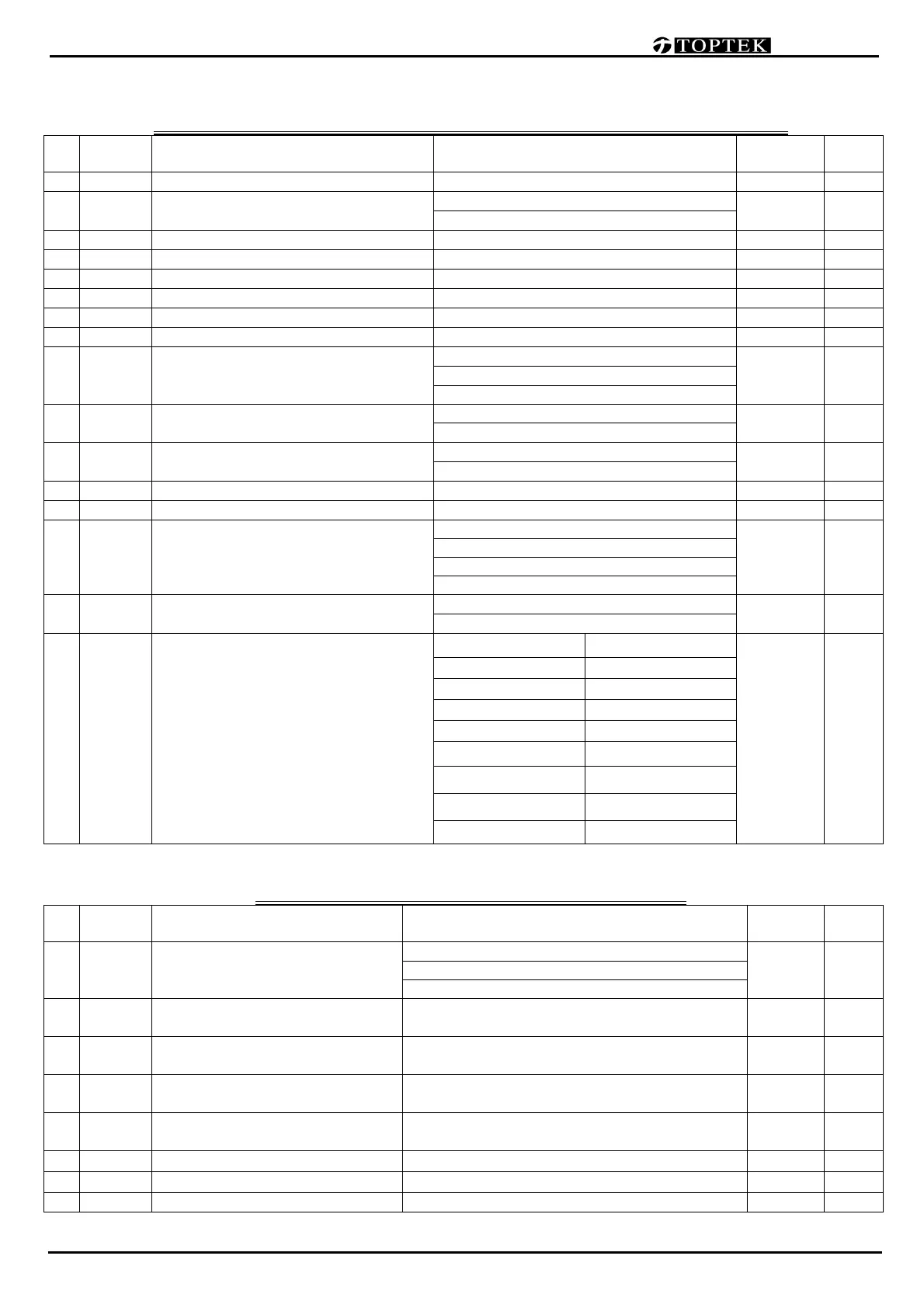
Group 7: High-function Parameters (PID and Communication)
Parame
ters
Functions Settings
Factory
Setting
User
Pr7-00 Proportional Gain (P) 0.0〜500.0% 80.0
0.00〜100.00 Sec
Pr7-01 Integral Time (I)
0.00:no integral
1.00
Pr7-02 Derivative Control (D) 0.00〜5.00 Sec 0.00
Pr7-03 Upper limit for Integral Control 0.0〜100.0% 100.0
Pr7-04 PID Output Frequency Limit 0.0〜100.0% 100.0
Pr7-05 PID Offset -100.0~+100.0% 0.0
Pr7-06 Primary Delay Filter Time 0.000~0.100 Sec 0.000
Pr7-07 PID Feedback Signal Detection Time 0.0〜6000.0 Sec 0.0
0: warn and keep operating
1: warn and RAMP to stop
Pr7-08
Treatment of the Erroneous PID
Feedback Signals
2: warn and COAST to stop
0
0: Warn and RAMP to stop
Pr7-9
Treatment of Keypad Transmission
Fault
1: Warn and COAST to stop
0
0.0: Disable and keep operating
Pr7-10 Keypad Transmission Fault detection
0.1~60.0 Sec
0.0
Pr7-11
Communication Address
1〜254 1
Pr7-12
Transmission Speed (Baud rate)
1.2〜125 Kbps 9.6
0: warn and keep operating
1: warn and RAMP to stop
2: warn and COAST to stop
Pr7-13
Transmission Fault Treatment
3: No warning and keep operating
3
0.0: disabled
Pr7-14 Time-out Detection
0.1~60.0 Sec
0.0
0:7,N,2 ASCII 9:8,E,2 ASCII
1:7,E,1 ASCII 10:8,O,2 ASCII
2:7,O,1 ASCII 11:8,N,1 RTU
3:7,E,2 ASCII 12:8,N,2 RTU
4:7,O,2 ASCII 13:8,E,1 RTU
5:8,N,1 ASCII 14:8,O,1 RTU
6:8, N,2 ASCII 15:8,E,2 RTU
7:8,E,1 ASCII 16:8,O,2 RTU
Pr7-15 Communication Protocol
8:8,O,1 ASCII
0
Group 8: Fan & Pump Control Parameters
Parame
ters
Functions Settings
Factory
Setting
User
0: V/F Curve determined by Parameter Group 1
1: 1.5 Power Curve
★
Pr8-00 V/F Curve Selection
2: Square Power Curve
0
Pr8-01
Start-Up Frequency of the
Auxiliary Motor
0.00〜600.00 Hz
0.00
Pr8-02
Stop Frequency of the Auxiliary
Motor
5.00〜600.00 Hz
5.00
Pr8-03
Time Delay before Stopping the
Auxiliary Motor
0.0〜6000.0 Sec 0.00
Pr8-04
Time Delay before Stopping the
Auxiliary Motor
0.0〜6000.0 Sec 0.00
Pr8-05 Sleep Frequency
0.00〜600.00 Hz
0.00
Pr8-06 Wake-up Frequency
0.00〜600.00 Hz
0.00
Pr8-07 Sleep Time 0.0〜6000.0 Sec 0.0
 Loading...
Loading...