K-38
E6581386
11
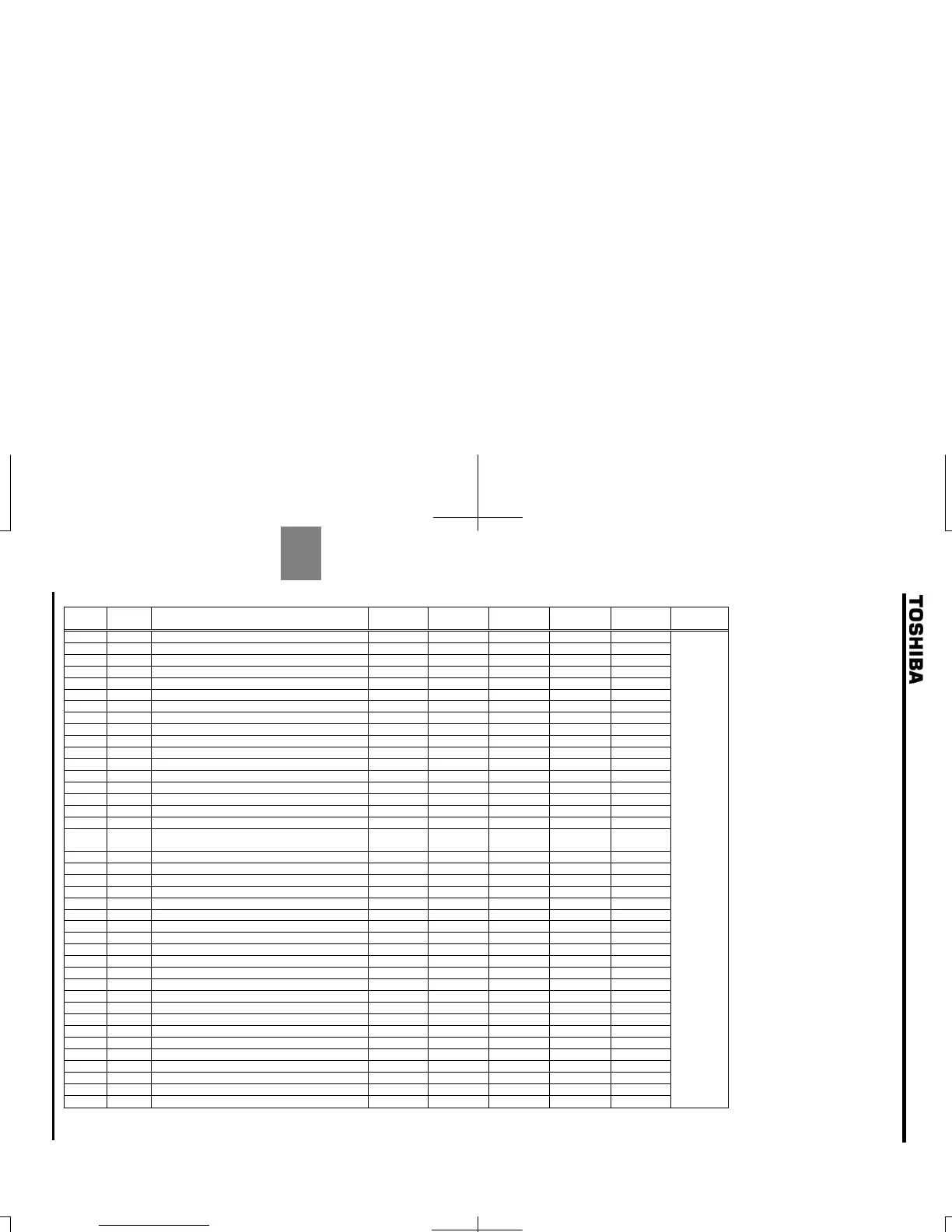
[Input terminal function setting] Sensorless vector/PG feedback control (●: valid, -: invalid)
Positive
logic
Negative
logic
Function
Vector
control
PM control V/f = = Reference
0 1 No function is assigned ●/● ● ● - -
2 3 F: Forward run command ●/● ● ● ● -
4 5 R: Reverse run command ●/● ● ● ● -
6 7 ST: Standby ●/● ● ● *1 -
8 9 RES: Reset ●/● ● ● *2 -
10 11 S1: Preset speed 1 ●/● ● ● ● -
12 13 S2: Preset speed 2 ●/● ● ● ● -
14 15 S3: Preset speed 3 ●/● ● ● ● -
16 17 S4: Preset speed 4 ●/● ● ● ● -
18 19 Jog run ●/● ● ● ● ●
20 21 Emergency stop ●/● ● ● *2 -
22 23 DC braking ●/● ● ● ● ●
24 25 Acceleration/deceleration switching ●/● ● ● ● -
28 29 V/f switching signal ●/● ● ● ● -
36 37 PID control OFF selection ●/● ● ● ● -
46 47 External thermal error ●/● ● ● ● -
48 49 Communication priority cancel ●/● ● ● ● -
50 51
Holding of HD operation (stop of three-wire
operation)
●/● ● ● ● -
52 53 PID differentiation/integration reset ●/● ● ● ● -
54 55 PID forward/reverse switching ●/● ● ● ● -
56 57 Forced continuous operation ●/● ● ● ● -
58 59 Specified speed operation ●/● ● ● ● -
64 65 My function RUN signal ●/● ● ● ● -
66 67 Auto-tuning signal ●/● ● ● ● -
74 75 Integrating wattmeter display clear ●/● ● ● ● -
76 77 Trace back trigger signal ●/● ● ● ● -
86 87 Binary data write ●/● ● ● ● -
88 89 Up/Down frequency (up)*3 ●/● ● ● ● -
90 91 Up/Down frequency (down)*3 ●/● ● ● ● -
92 93 Up/Down frequency (clear) ●/● ● ● ● -
94 95 Dancer Correction OFF ●/● ● ● ● -
98 99 Forward/reverse selection ●/● ● ● ● -
100 101 Run/Stop command ●/● ● ● ● -
102 103 Commercial power/INV switching ●/● ● ● ● -
104 105 Frequency reference priority switching ●/● ● ● ● -
106 107 VI/II terminal priority ●/● ● ● ● -
108 109 Command terminal board priority ●/● ● ● ● -
110 111 Parameter editing enabling ●/● ● ● ● -
122 123 Rapidest deceleration command ●/● ● ● ● -
124 125 Preliminary excitation ●/● ● ● ● -
7.2.1
*1: Valid any time
*2: Independent of , and all command are valid.
*3: The deceleration/deceleration time depends on the / setting, unless switching between acceleration and deceleration is performed.

 Loading...
Loading...