12 Drive Control, Duty Modes, and Programming
EN 26 YASKAWA ELECTRIC TOEP C710617 17B YASKAWA AC Drive GA700 Initial Steps
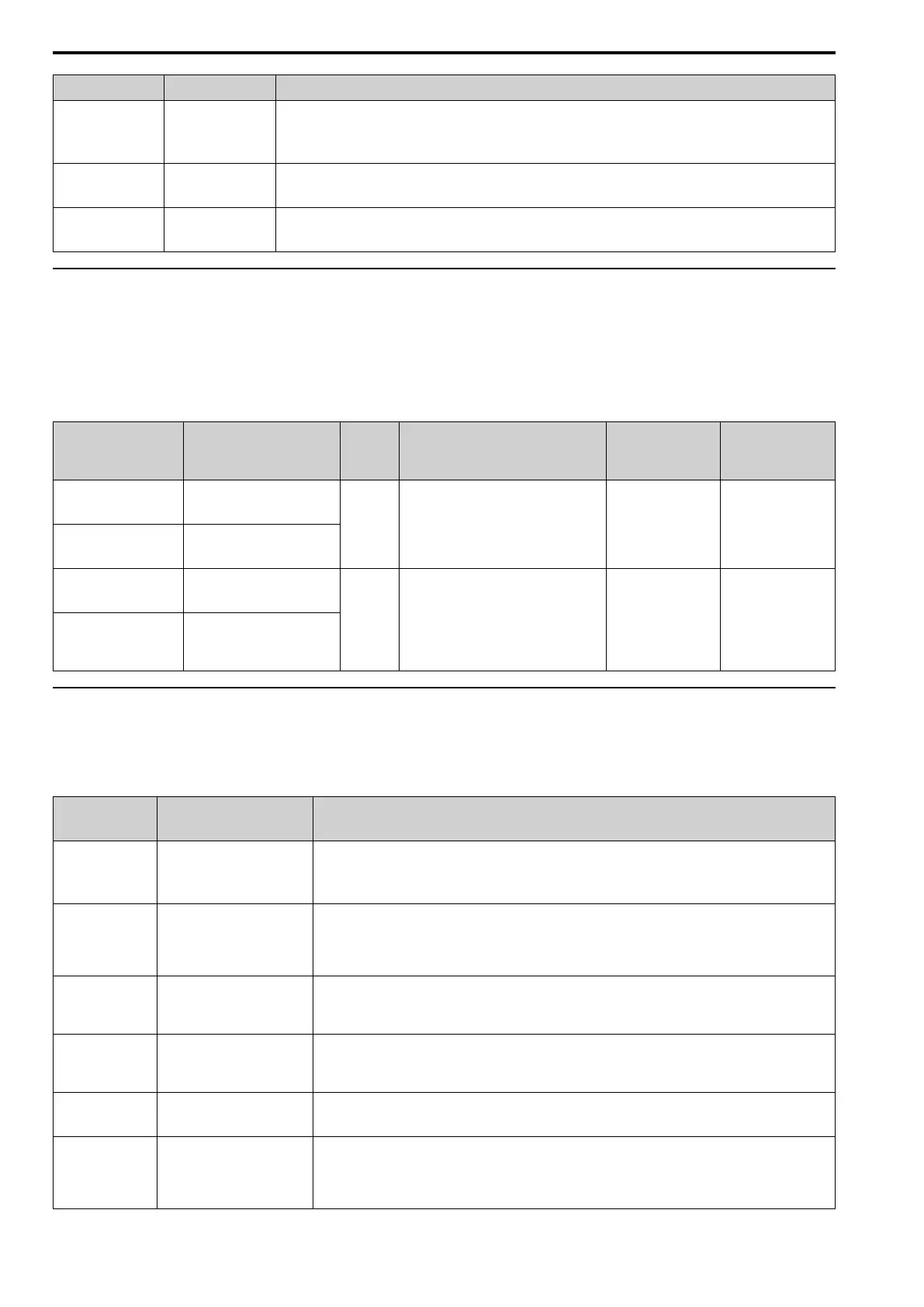
Control Method A1-02 Setting Main Applications
V/f
0
(default)
• General variable-speed
• Operating more than one motor from one drive
• When replacing the motor without motor parameter values.
OLV 2
• General variable-speed
• High precision and speed control without speed feedback
EZOLV 8
• General variable-speed
• No high precision, no speed control, and no speed feedback
◆ Drive Duty Modes
The drive has two duty modes from which to select for the application: Heavy Duty (HD) and Normal Duty (ND).
The duty rating name switches to [Normal Duty 2 Rating] or [Heavy Duty 2 Rating] when E1-01 [Input AC
Supply Voltage] ≥ 460 V.
Refer to Table 12.1 for information about the differences between HD and ND ratings.
Table 12.1 Drive Duty Modes
C6-01
[Normal / Heavy
Duty Selection]
E1-01
[Input AC Supply
Voltage]
C6-01
Setting
Application
Default Carrier
Frequency
oL2
[Drive
Overload]
Heavy Duty Rating
(HD1)
• ≥ 200 V and < 240 V
• ≥ 380 V and < 460 V
0
• Extruder
• Conveyor
• Constant torque or high overload
capacity
2 kHz
150% rated output
current for 60 s
Heavy Duty 2 Rating
(HD2)
≥ 460 V and < 480 V
Normal Duty Rating
(ND1)
• ≥ 200 V and < 240 V
• ≥ 380 V and < 460 V
1
• Fan
• Pump
• Blower
• Variable speed control
2 kHz
Swing-PWM
110% rated output
current for 60 s
Normal Duty 2
Rating
(ND2)
≥ 460 V and < 480 V
◆ Drive Parameters
Refer to the table when setting the most important parameters.
Note:
Users can change parameters with "RUN" in the "No." column during Run.
No.
(Hex.)
Name Description
A1-00
(0100)
RUN
Language Selection Sets the language for the LCD keypad.
0: English, 1: Japanese, 2: Deutsch, 3: Français, 4: Italiano, 5: Español, 6: Português,
7: Chinese, 8: Czech, 9: Russian, 10: Turkish, 11: Polish, 12: Greek
A1-02
(0102)
Control Method Selection Sets the control method for the drive application and the motor.
0: V/f Control, 1: V/f Control w/ PG, 2: Open Loop Vector, 3: Closed Loop Vector,
4: Advanced Open Loop Vector, 5: PM Open Loop Vector,
6: PM Advanced Open Loop Vector, 7: PM Closed Loop Vector, 8: EZ Vector Control
A1-03
(0103)
Initialize Parameters Sets parameters to default values.
0: No Initialization, 1110: User Initialization, 2220: 2-Wire initialization,
3330: 3-Wire initialization
b1-01
(0180)
Frequency Reference
Selection 1
Sets the input method for the frequency reference.
0: Keypad, 1: Analog Input, 2: MEMOBUS/Modbus Communications, 3: Option PCB,
4: Pulse Train Input
b1-02
(0181)
Run Command Selection
1
Sets the input method for the Run command.
0: Keypad, 1: Digital Input, 2: Memobus/Modbus Communications, 3: Option PCB
b1-03
(0182)
Stopping Method
Selection
Sets the method to stop the motor after removing a Run command or entering a Stop
command.
0: Ramp to Stop, 1: Coast to Stop, 2: DC Injection Braking to Stop,
3: Coast to Stop with Timer, 9: Stop with Constant Distance
 Loading...
Loading...





