SS1 ramp parameters in the drive/inverter unit
Set these parameters only for the SS1 function.
If FSO parameter 200.112 is set to 0 ms, drive parameters define the stop ramp that is used
in the SS1 function:
•
21.04 Emergency stop mode is set to value Eme ramp stop (Off3)
•
23.23 Emergency stop time is set to a suitable value.
Also in this case, the FSO module monitors the actual stop ramp (ramp monitoring or time
monitoring). For more information, see the drive firmware manual and FSO module user's
manual.
■ FSE module and safety pulse encoder parameters
Set these parameters only when you use a safety pulse encoder and the FSE-31 pulse
encoder interface module with the FSO-21 module.
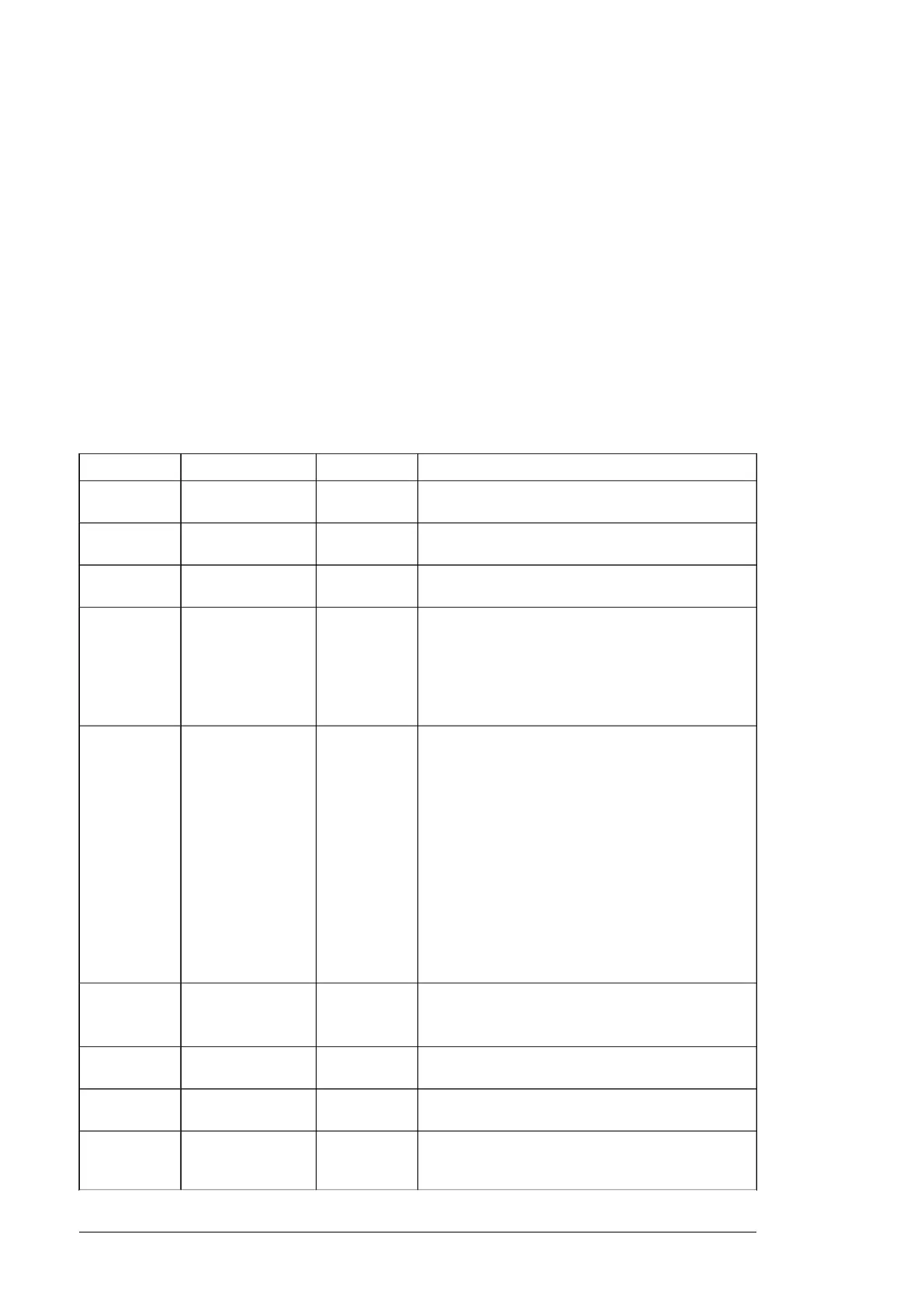
DescriptionExample valueNameIndex
Activates the FSE-31 encoder interface and shows the
version of the encoder parameter groups (91 and 92).
Version 1FSE 3X act and par
version
200.231
Shows the number of safety pulse encoders connected
to the FSE module.
Single encoder
CH1
Number of encoders200.232
Activates the safety pulse encoder and shows the ver-
sion parameter group S_ENCGEN.
Version 1Safe pulse encoder
version
S_ENCGEN.01
Sets the action taken when there is a problem with the
FSE module.
STOFSE diagnostic fail-
ure reaction
S_ENCGEN.11
STO: The FSO module goes into the Fail-safe mode
and activates the drive STO function.
Note: This parameter is relevant only when there are
no active safety functions.
Sets the encoder speed cross comparison tolerance.
This defines how much the axle speed of the motor can
change within 1 ms.
1.0 rpmEnc speed cross
comp tolerance
S_ENCGEN.14
Adjust the default value to meet the motor in use.
This parameter is used for the encoder diagnostic. It
defines the maximum difference between the speed
information from channel A and B of the encoder. If the
difference of these two values is more than defined by
this parameter, FSO will safely stop the system (STO).
The suitable value depends on the configuration (motor
and load). Typically this value is between 2 … 10 rpm.
A value that is too small will cause an encoder fault
(A7D8). A value that is too big will prevent the encoder
diagnostic related to this parameter.
Sets the rotation direction for the safety pulse encoder.1Gear numerator en-
coder 1
S_ENCGEN.41
With this parameter, you can change the rotation direc-
tion of the motor. Adjust the default value if necessary.
Sets the type of the safety pulse encoder interface
module 1.
FSE-31Module 1 type91.11
Sets the slot in which the safety pulse encoder interface
module 1 is located.
2Module 1 location91.12
Activates or deactivates the communication with the
safety pulse encoder interface module 1 and sets the
type for the safety pulse encoder.
HTL1Encoder 1 type92.01
50 Parameter settings

 Loading...
Loading...











