7 The robot performs a measurement sequence by rotating the axis back and
forth.
8 Remove the calibration tool and reinstall the protective cover on the fixed
pin and the protection plug in the bushing, if any.
9 The robot moves to verify that the calibration tool is removed.
10 Choose whether to save the calibration data or not.
Calibration of the robot is not finished until the calibration data is saved, as last
step of the calibration procedure.
Preparation prior to calibration
The calibration procedure is described in the FlexPendant while conducting it.
NoteAction
DANGER
While conducting the calibration, the robot needs
to be connected to power.
Make sure that the robots working area is empty,
as the robot can make unpredictable movements.
1
Use a clean cloth.Wipe the calibration tool clean.
Note
The calibration method is exact. Dust, dirt or color
flakes will affect the calibration value.
2
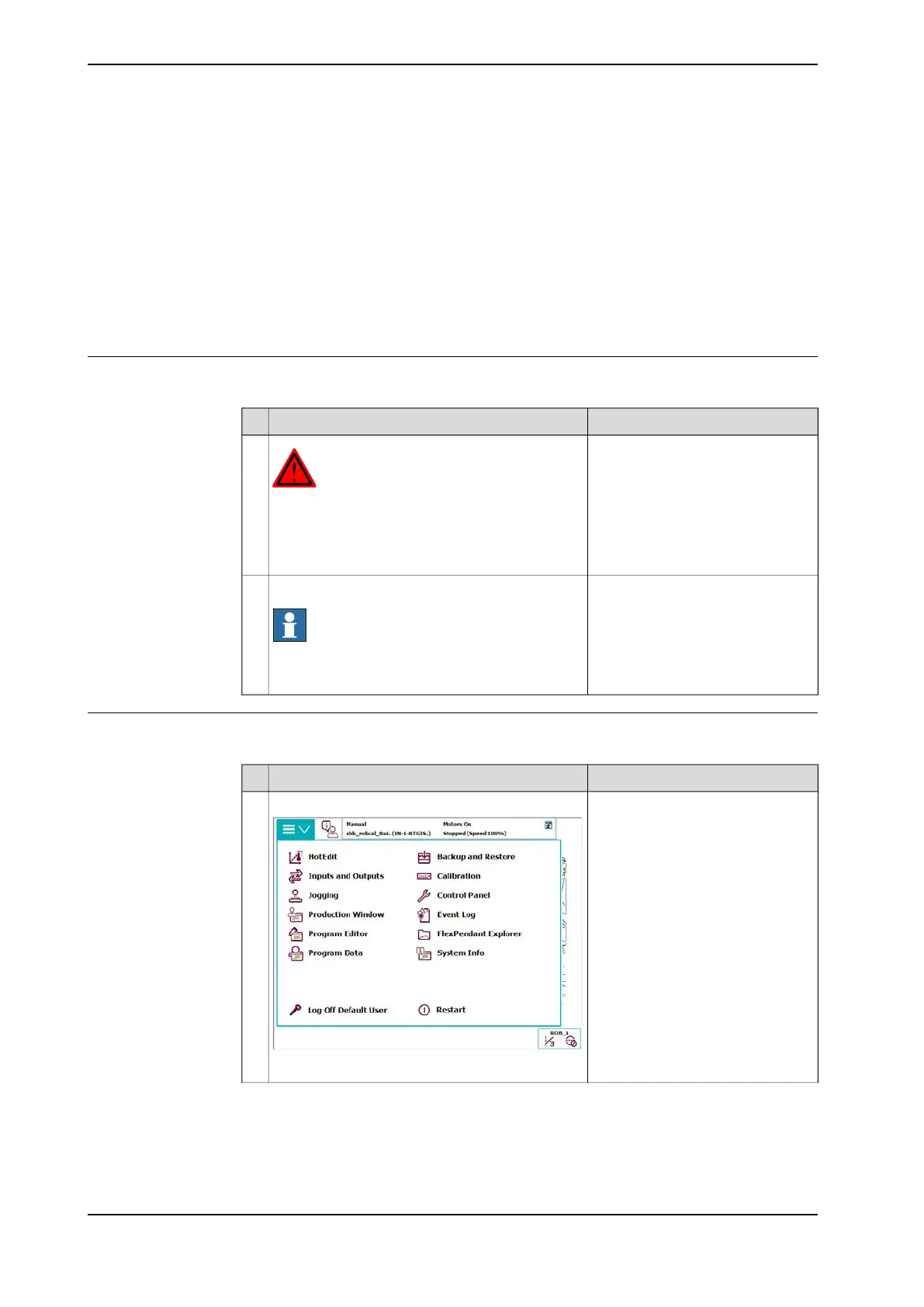
Starting the calibration procedure
Use this procedure to call for the Axis Calibration method on the FlexPendant.
NoteAction
On the ABB menu, tap Calibration.
xx1500000942
1
Continues on next page
358 Product manual - IRB 6660
3HAC028197-001 Revision: S
© Copyright 2007-2018 ABB. All rights reserved.
5 Calibration
5.4.4 Axis Calibration - Running the calibration procedure
Continued

 Loading...
Loading...







