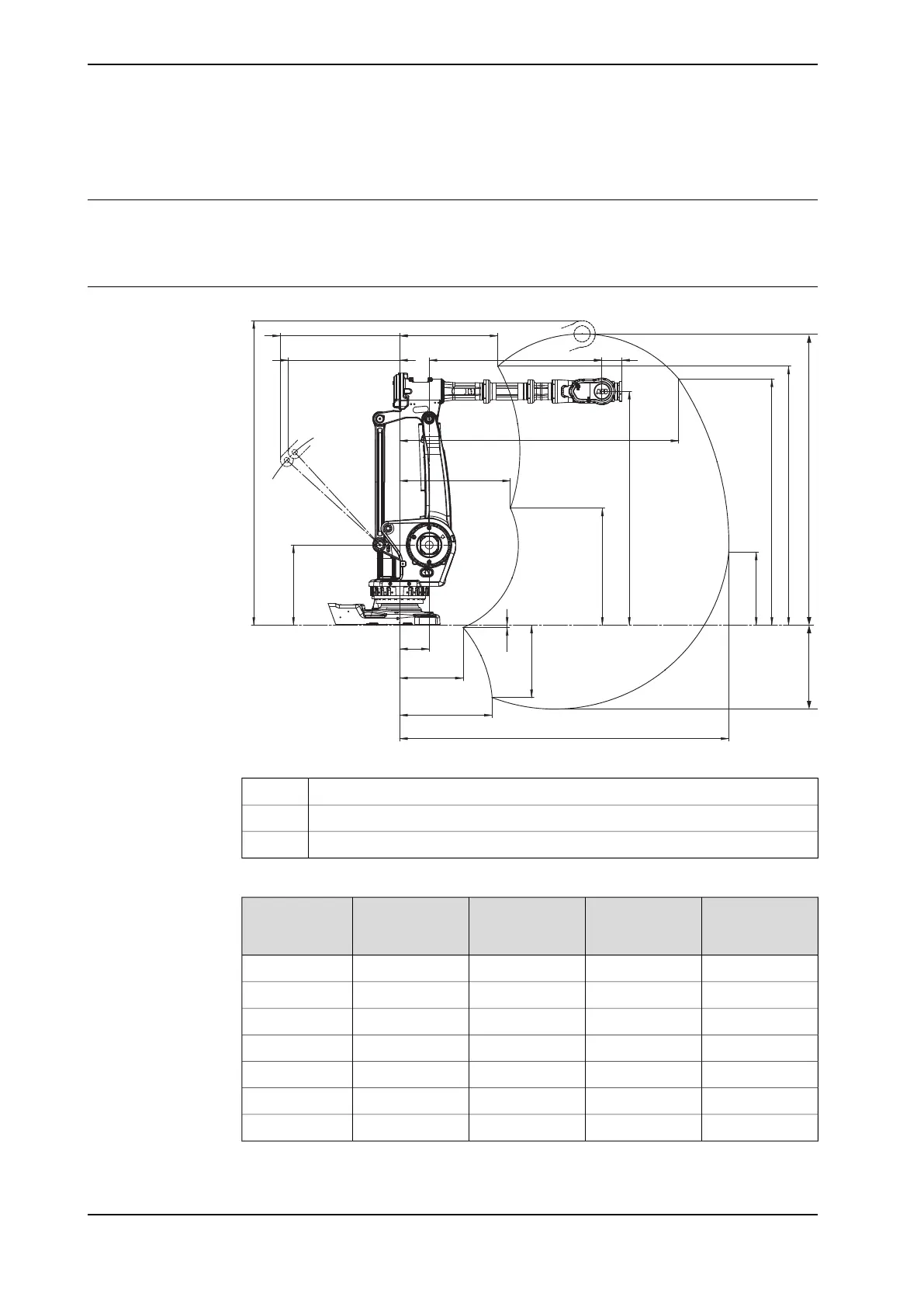
2.2.2 Working range and type of motion
Working range
The following figures show the working ranges of the robot variants. The extreme
positions of the robot arm are specified at the wrist center (dimensions in mm).
IRB 6660 - 100/3.3
3343
2834
997
1125
1189
645
23
734
940
3092 (C)
2374,5
300
814,5
1755,5 200
2629
2501
742
1131 (B)
1211 (A)
C
B
D
E
G
A
F
2958851
xx1200000979
Mechanical stop(A)
Max. working range(B)
Max. working range(C)
Positions at wrist center
Axis 3 angle (de-
grees)
Axis 2 angle (de-
grees)
Z position (mm)X position (mm)Position num-
ber, see figure
above
002374,52055.5A
-20-422629997B
28-4211891125C
12050-23645D
12085-734940E
15857423343F
-205025012834G
Continues on next page
54 Product manual - IRB 6660
3HAC028197-001 Revision: S
© Copyright 2007-2018 ABB. All rights reserved.
2 Installation and commissioning
2.2.2 Working range and type of motion
 Loading...
Loading...








