9. L’Algoritmo di regolazione PID
9.1 Introduzione
A causa della vastità e complessità di applicazioni che questo strumen-
to può gestire è necessario, a volte, procedere con una regolazione più
sofisticata. Molto spesso si desidera che il punto di equilibrio del siste-
ma corrisponda con il valore di Set-Point impostato o che addirittura il
regolatore risponda in anticipo alle variazioni che si possono verificare.
Tutto questo può essere ottenuto aggiungendo alla regolazione propor-
zionale (standard), la regolazione di tipo integrale e/o quella di tipo
derivativa. La regolazione di tipo integrale agisce sullo scostamento del
set dal punto di equilibrio tentando di ridurlo a zero, mentre quella
derivativa interviene sulla rapidità di risposta del regolatore in modo da
anticipare le variazioni del sistema. Si precisa fin dall’inizio che “opera-
re” con la regolazione per mezzo dell’algoritmo PID, prevede prima
una adeguata conoscenza del sistema, in modo tale da fissare i para-
metri di regolazione con dovuta cautela e attenzione.
9.2 Regolazione P+I. Calcolo dell’errore integrale
Questo tipo di regolazione viene impostata fissando il parametro
C21=PI. Gli altri parametri interessati sono:
P01 o P02 oltre al differenziale di regolazione per le uscite
On/Off, definiscono la zona dove è attivo il
calcolo dell’errore integrale
P05 tempo di integrale
Il parametro P05 permette di impostare il tempo di integrale; fissa cioè
il tempo trascorso oltre il quale si ottiene l’errore totale pari al doppio
dello scostamento del set rispetto al punto di equilibrio. In questo modo
il controllo aggiusta la regolazione in modo da ridurre l’errore a zero.
Un valore tipico di questo parametro, che suggeriamo di fissare come
prima impostazione, è di 600 s. Il calcolo dell’errore integrale non
avviene su tutta la regolazione, ma solamente quando la grandezza da
misurare si trova nella zona pari al differenziale P01 o P02 maggiorato
del 10%. Al di fuori di questa, è attiva solo la regolazione proporziona-
le. L’algoritmo per la gestione dell’errore integrale è sempre relativo a
P01 o P02, anche se la regolazione avviene tramite l’uscita analogica
che fa riferimento alla sua banda proporzionale (P07). Risulta quindi,
che se anche P07 è maggiore di P01 o P02, ugualmente l’errore verrà
calcolato entro i limiti imposti da uno di questi due parametri.
Si noti che la regolazione P+I non è attiva nella cofigurazione C01=2,
mentre quando impostato C01=2d o C01=HP, l’errore viene azzerato
ad ogni commutazione del Set-Point.
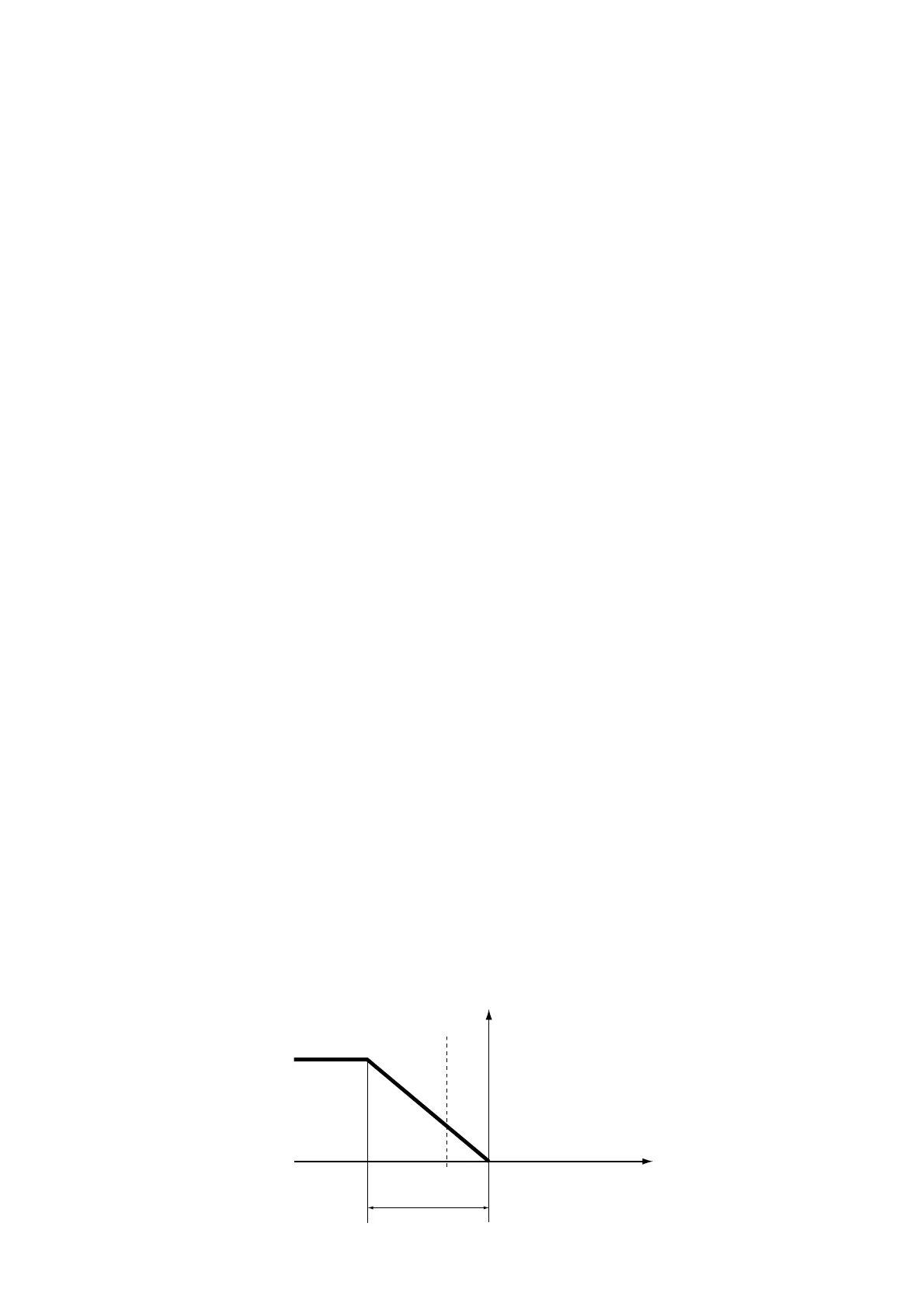
Esempio: Supponiamo di gestire un forno, tramite la regolazione P.A,
con un Set-Point impostato di 200 °C. È già passato più di qualche
minuto e la temperatura si è stabilizzata a 197 °C (punto di equilibrio,
vedere fig. 43)). L’errore proporzionale in questo caso vale 3.
A questo punto impostiamo C21=PI, e P05=600. Se nulla cambia,
dopo 600 s. (10 minuti), per quanto detto sopra, l’errore totale non sarà
più dato solo dall’errore proporzionale, ma anche dalla somma di quel-
lo integrale (anch’esso varrà 10 °C). Pertanto l’errore totale sarà di 6
°C. In questo modo il controllo agirà considerando internamente la
misura letta non più di 197 °C ma di
194 °C. Il risultato finale sarà che il
punto di equilibrio verrà spostato
automaticamente a 200 °C. Nella
realtà, solitamente quello che avviene
non è esattamente questo. Infatti, una
volta attivato il PI, il controllo incre-
menta l’errore integrale (quindi quello
totale) istante dopo istante: ciò signifi-
ca che istante dopo istante lo stru-
mento agirà per ridurre l’errore che si
sta accumulando e quindi si presume
che la grandezza da controllare vari
di conseguenza in modo continuo.
9.The PID regulation algorithm
9.1 Introduction
Because of the vastness and complexity of applications that can be
managed by this unit it is essential, at times, to use a more sophistica-
ted regulation.Very often the system balance point is desired to be cor-
responding to the selected Set-Point value or the control is desired to
answer in advance to the variations that may occur.
All this can be achieved by adding to the proportional regulation (stan-
dard), the integral type regulation and/or the derivative one.
The integral type regulation acts on the deviation of the Set-Point from
the balance point trying to reduce it to zero, while the derivative one
intervenes on the answering speed of the control so as to anticipate
any system variation. It is important to specify that “operating” with the
regulation by means of the PID algorithm, implies a suitable knowledge
of the system, so as to fix the regulation parameters with caution.
9.2 P+I regulation. Calculation of the integral error
This type of regulation is selected by setting parameter C21=PI.The
other involved parameters are:
P01 or P02 besides the regulation differential for the ON/OFF
outputs, they define the zone where the integral error
calculation is active
P05 time of integral
Parameter P05 allows to set the time of integral; that is, it fixes the time
after which the total error is obtained, which is twice as much as the
deviation of the Set-Point from the balance point. In this way the control
adjusts the regulation so as to reduce the error to zero.
A typical value of this parameter we suggest to fix as first setting, is of
600s.The integral error calculation does not occur on all the regulation,
but only when the measurement to be controlled falls in the zone equal
to the differential P01 or P02 increased of 10%. Outside its limits, only
the proportional regulation is active.
The algorithm for the management of the integral error is always relati-
ve to P01 or P02, even if the regulation is effected through the analog
output which refers to its proportional zone (P07).
Therefore, even if P07 is higher than P01 or P02, the error will be as
well calculated within the limits set by one of these two parameters.
It should be noted that the regulation P+I is not active in the configura-
tion C01=2, and when C01=2d or C01=HP, the error is set to zero at
every Set-Point commutation.
Example: Suppose you have to manage an oven, with a P.A regulation,
with a selected Set-Point of 200°C. A few minutes have already ela-
psed and the temperature has settled to 197°C (balance point, see fig.
43).The proportional error in this case is 3. At this point we select
C21=PI, and P05=600. If nothing changes, after 600s. (10 minutes), the
total error will be no longer given only by the proportional error, but
also by the sum of the integral one (it will be 10°C as well).Therefore
the total error will be 6°C. In this way the control will operate conside-
ring internally the effected measurement no longer of 197°C but of
194°C.The final result will be that the
balance point will be automatically
shifted to 200°C. Actually what usual-
ly occurs is not exactly this. In facts,
once PI has been activated, the con-
trol increases the integral error
(therefore the total one) instant after
instant: this means that, instant after
instant, the unit will operate to reduce
the error which is accumulating and
therefore the measurement to be con-
trolled is supposed to vary as a con-
sequence in a continuous way.
39
 Loading...
Loading...






