Chapter 6 Control Mode of Operation ASDA-A2R Series
6-8 Revision December, 2014
6.2.5 Electronic Gear Ratio
Related parameters: Please refer to Chapter 8 for further information
Parameter Abbr. Function
P1-44 GR1 Gear Ratio (Numberator) (N1)
P1-45 GR2 Gear Ratio (Denominator) (M)
Electronic gear provides simple ratio change of travel distance. The high electronic gear
ratio would cause the position command to be the stepped command. S-curve or
low-pass filter can be used to improve the situation. When electronic gear ratio is set to 1,
the motor will turn one cycle for every 1280000PUU. When electronic gear ratio is
changed to 0.5, then every two pulses from the command will be refer to one PUU of
motor encoder.
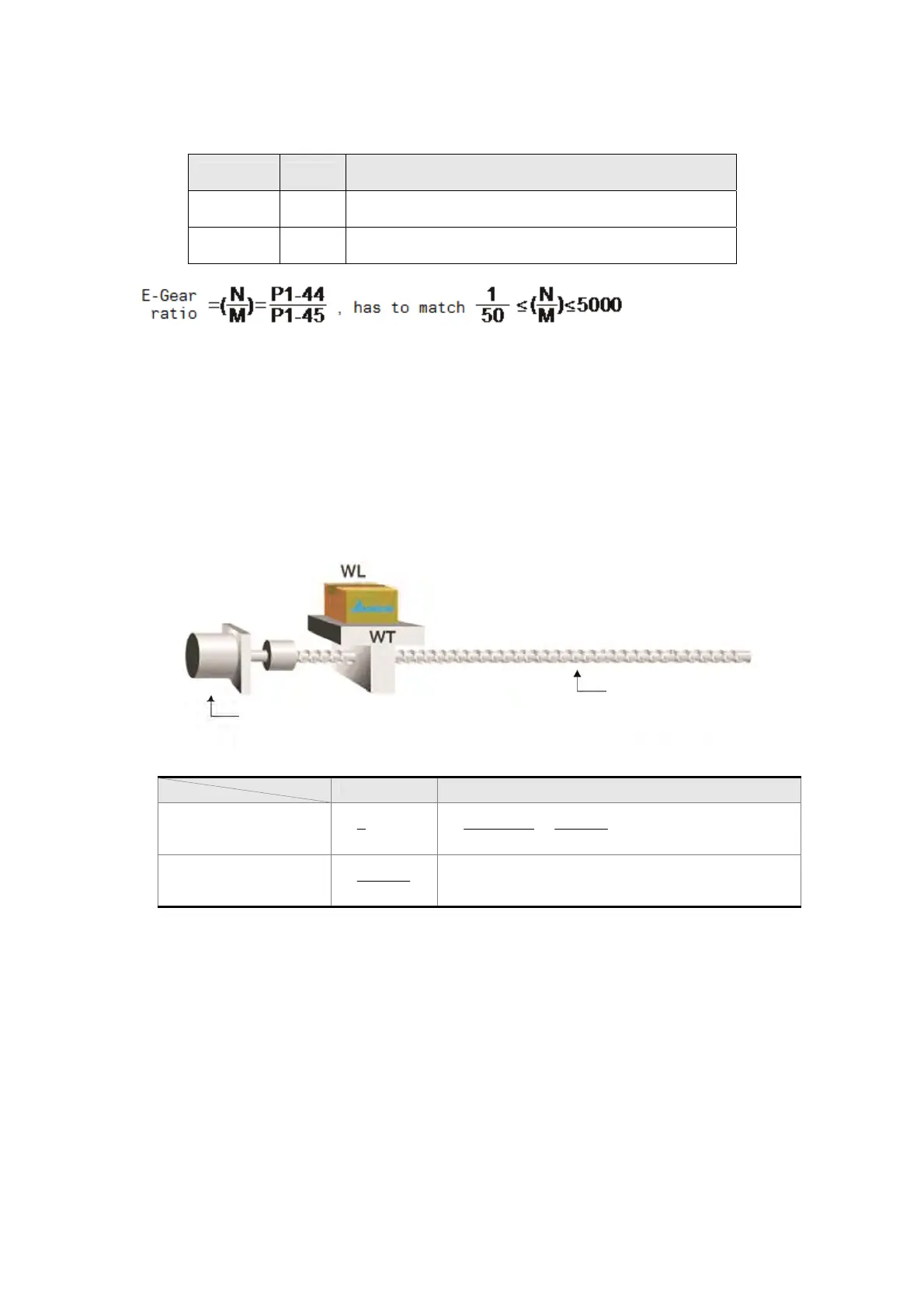
For example (rotary motor): after setting the electronic gear ratio properly, the moving
distance of the object is 1μm/pulse, which is easier to use.
Gear Ratio Moving distance of each pulse command
Electronic gear is
unapplied.
1
1
m
10000
3000
25004
10003
Eectronic gear is
applied.
3000
10000
m1
Ball Screw
Pitch: 3 mm
WL: Working Load
WT: Working Table
Motor (Encoder resolution: A/B, Z)
Encoder: 1280000 pulse/rev

 Loading...
Loading...