Chapter 7 Motion Control ASDA-A2R Series
7-24 Revision December, 2014
7.10.1 The Relation between the Previous Path and the Next Path
1) Interrupt (the previous path) and overlap (the next path) can be set in every path
Note: Path (procedure)
2) The priority of interrupt command is higher than overlap
PATH 1 PATH 2 Relation Output Note
OVLP=0 INS=0
In
sequence
DLY 1
PATH 1/2 which could be the
combination of speed/position
OVLP=1 INS=0 Overlap NO DLY
PATH 2 is SPEED and does not
support overlap
OVLP=0
INS=1 Interrupt N/A
PATH 1/2 which could be the
combination of speed/position
OVLP=1
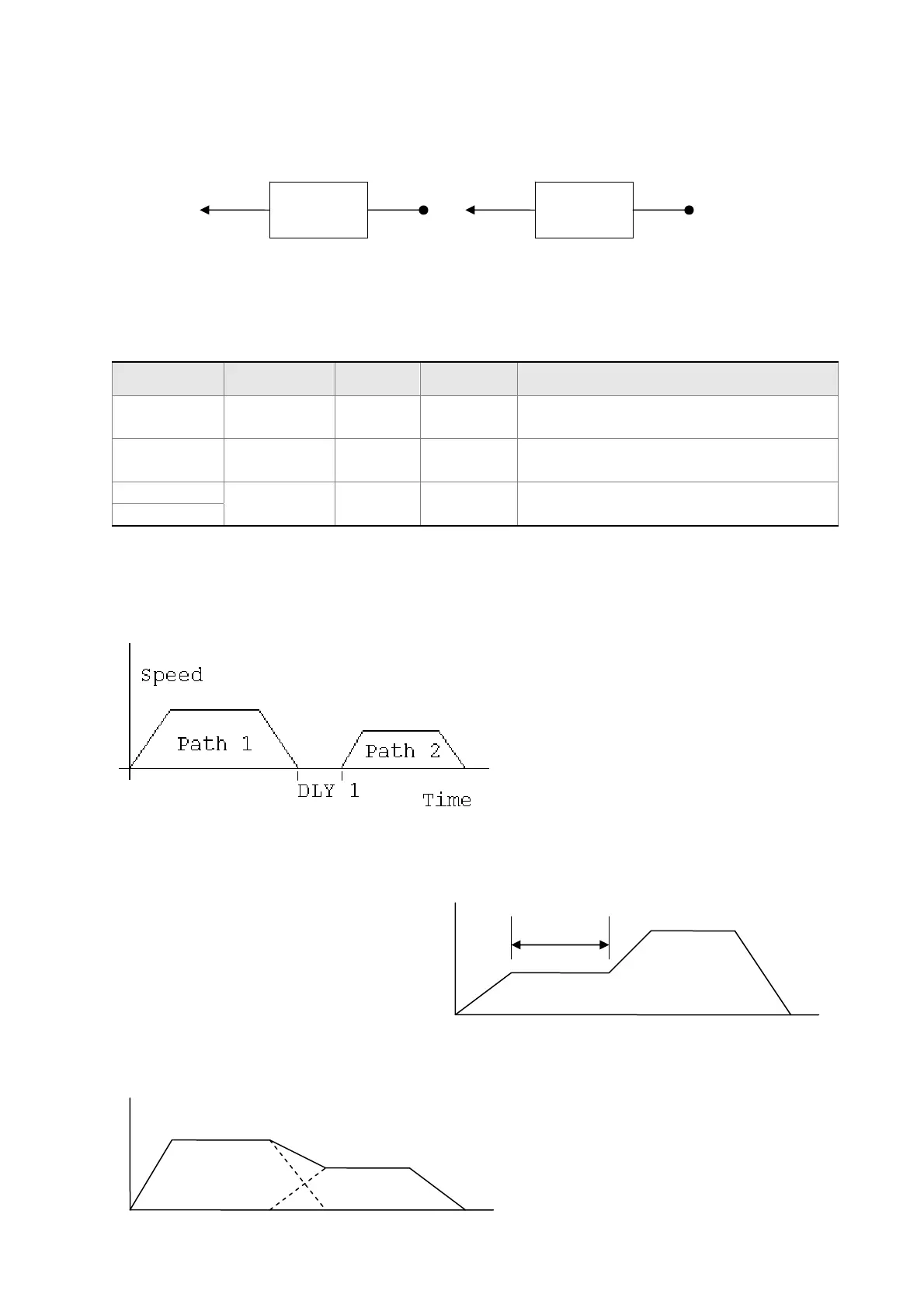
7.10.2 Programming the Path in PR Mode
1) Sequence command
Path 1: is AUTO and has set DLY
Path 2: does not set INS
(DLY starts to count after completing
the command)
Path 1: speed command and has
set DLY
Path 2: position command
(DLY starts to count after completing
the command)
2) Overlap
Path 1: has set OVLP but cannot set
DLY
Path 2: does not set INS
Path 1 Path 2
INS OVLP INS OVLP
Path 2
DLY 1
Speed 1
Path 1
Path 2
 Loading...
Loading...
