Chapter 16 PLC Function Applications│CP2000
16-143
16-9 Explanation of various PLC speed mode controls
Speed mode supports SVC control. Under the speed mode of SVC control, it cannot be
performed successfully unless finish motor parameter auto tuning ahead of time.
Control methods and settings are explained as follows:
Speed control:
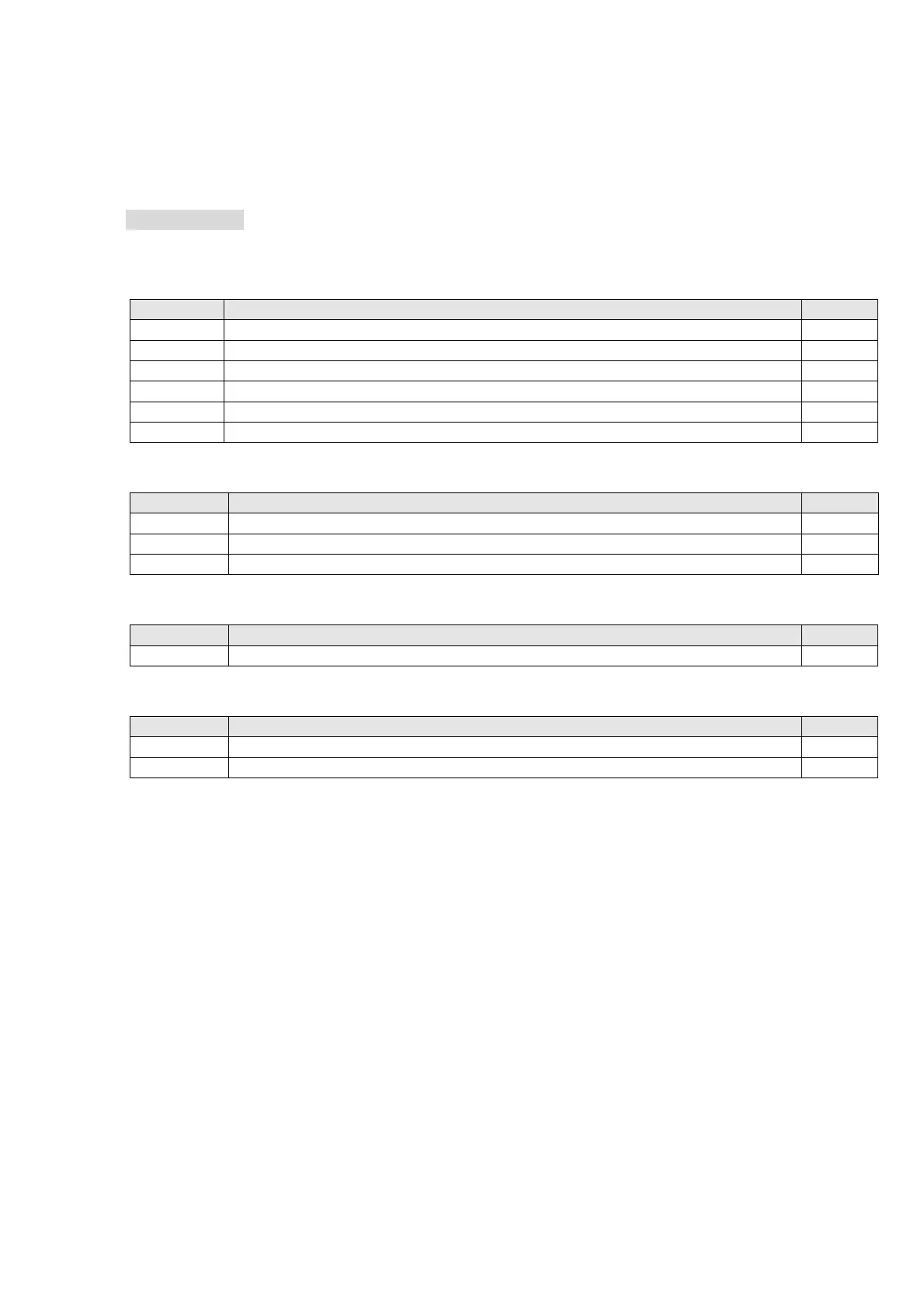
Register table for speed mode:
Control special M
Special M Description of Function Attributes
M1025 Driver frequency = set frequency (ON)/driver frequency =0 (OFF)
RW
M1026 Driver operating direction FWD(OFF)/REV(ON)
RW
M1040 Hardware power (Servo On)
RW
M1042 Quick stop
RW
M1044 Pause (Halt)
RW
M1052 Lock frequency (lock, frequency locked at the current operating frequency)
RW
Status special M
Special M Description of Function
ttributes
M1015 Frequency attained (when used together with M1025)
RO
M1056 Servo On Ready
RO
M1058 On Quick Stopping
RO
Control special D
Special D Description of Function
ttributes
D1060 Mode setting (speed mode is 0)
RW
Status special D
Special D Description of Function
ttributes
D1037 Converter output frequency (0.00–600.00)
RO
D1050 Actual operating mode (speed mode is 0)
RO
Speed mode control commands:
FREQ (P) S1 S2 S3
Target speed The first acceleration time setting The first deceleration time setting
Example of speed mode control:
Before performing speed control, if the SVC control method is used, setting of electromechanical
parameters must first be completed.
1. Setting D1060 = 0 will shift the converter to the speed mode (default).
2. Use the FREQ command to control frequency, acceleration time, and deceleration time.
3. Set M1040 = 1, the driver will now be excited, but the frequency will be 0.
4. Set M1025 = 1, the driver frequency command will now jump to the frequency designated
by FREQ, and acceleration/deceleration will be controlled on the basis of the acceleration
time and deceleration time specified by FREQ.
5. M1052 can be used to lock the current operating frequency.
6. M1044 can be used to temporarily pause operation, and the deceleration method will comply
with deceleration settings.