5-1
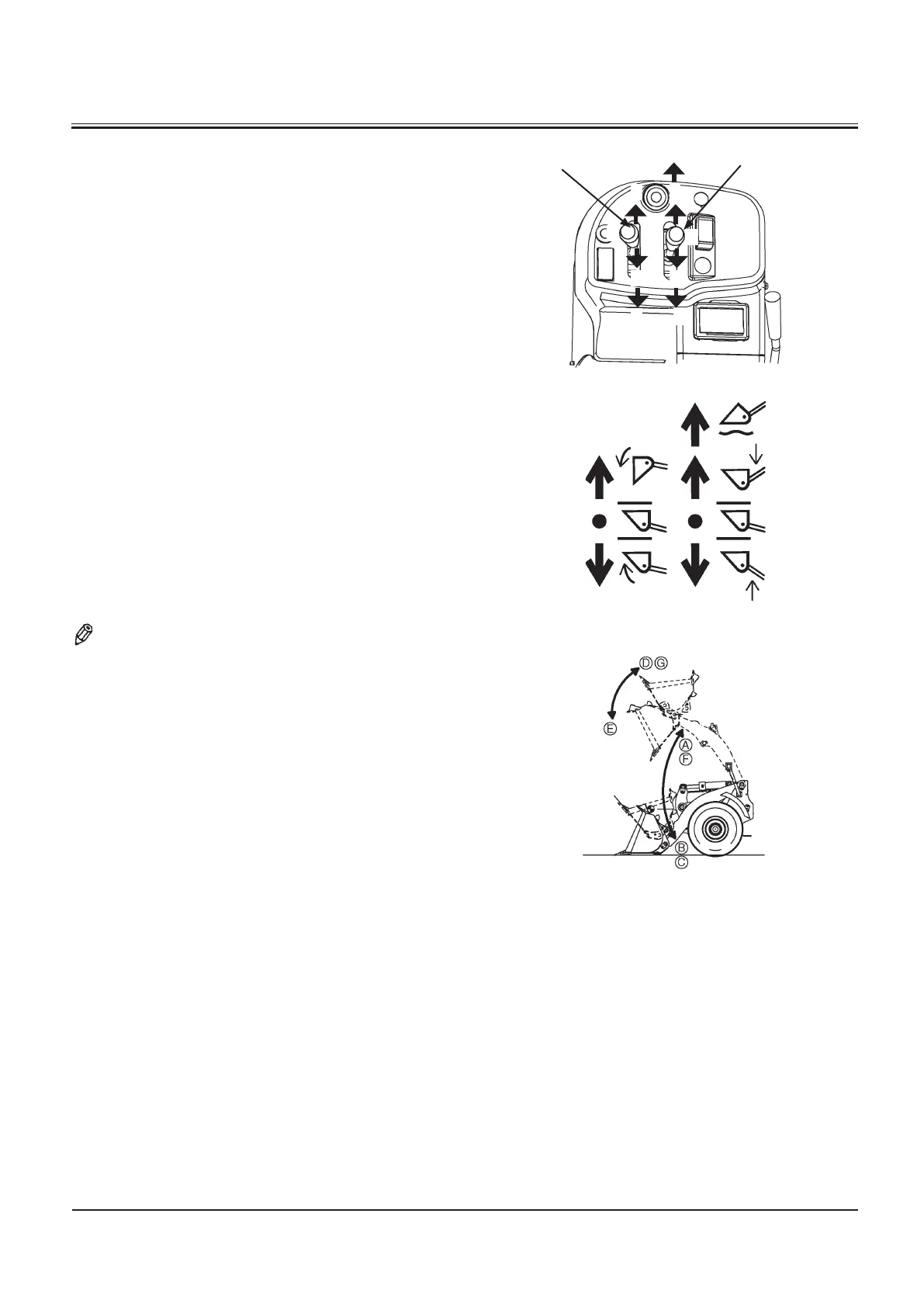
Is used to operate the lift arm and/or bucket.
(C) Float: The lift arm free falls and can be moved as loads are
applied.
(B) Lift arm Lower
(N) Hold: The lift arm is stopped and held in that position.
(A) Lift arm Raise
(F) Detent: The lift arm is held in the rasised position
(E) Bucket Dump: The bucket is tilted forward to dump the
bucket load.
(N) Hold: The bucket is stopped and held in that position.
(D) Bucket Tilt: The bucket is tilted back, taking the transpor
-
tation attitude.
(G) Detent: When the bucket control lever is moved from
the bucket dump position to the bucket tilt position, the
bucket control lever is maintained in this position.
NOTE: • When lift arm control lever (1) is pulled further from
the RAISE position (A), the lever is held in that posi
-
tion (F). Then, as soon as the lift arm is raised up to
the position set by the arm kick out system, the arm is
automatically returned to the HOLD position (N).
• After dumping the bucket, when bucket control lever
(2) is pulled further from the TILT position (D), the
lever is held in that position (G). Then, as soon as the
bucket is tilted up to the position set by the bucket
auto-leveler, the bucket is automatically returned to
the HOLD position (N).
M4GB-01-043
M4GB-01-072
M4GB-01-073

 Loading...
Loading...
