- 77 -
4 Parameter Description
4
4.3 Parameter Table
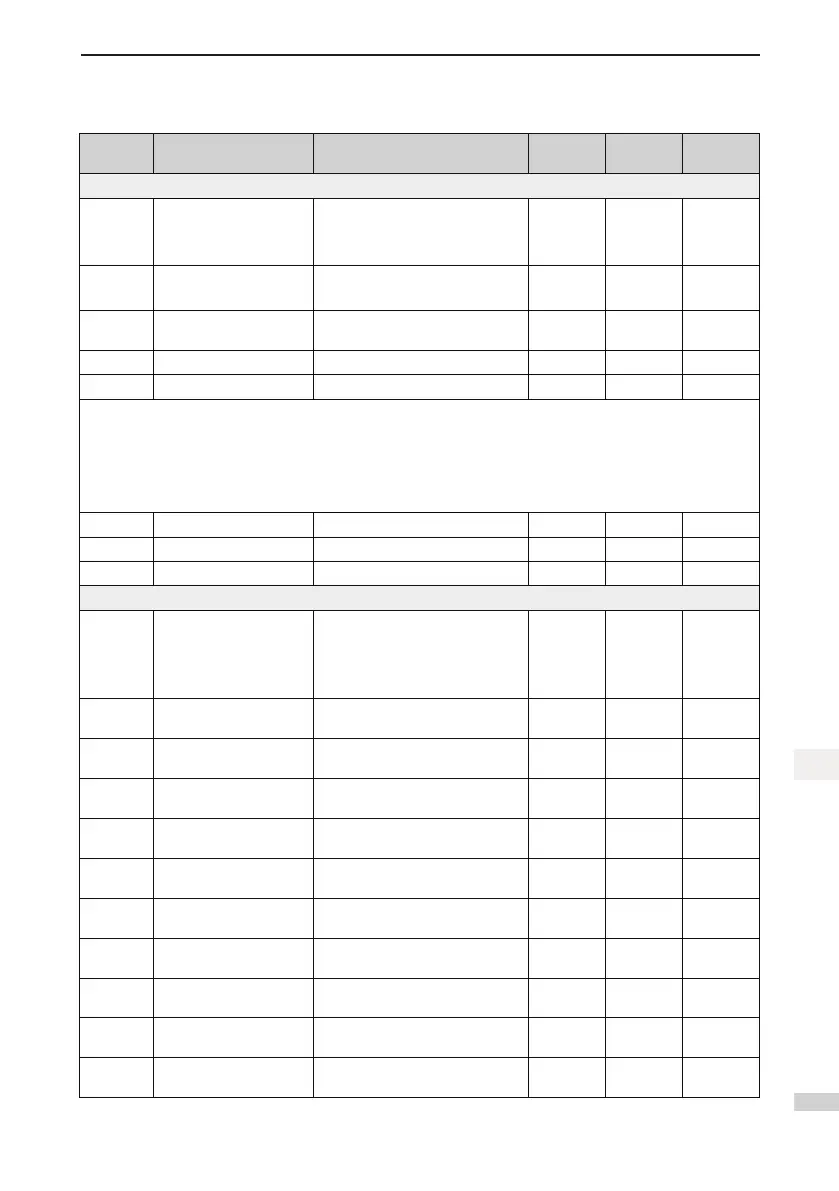
Parameter
No.
Parameter Name Setting Range Default Unit
Property
Group F0: Basic parameters
F0-00 Control mode
0: Sensorless vector control (SVC)
1: Feedback vector control (FVC)
2: Voltage/Frequency (V/F) control
1 -
★
F0-01
Command source
selection
0: Operation panel control
1: Distance control
1 -
★
F0-02
Running speed under
operation panel control
0.050 to F0-04 0.050 m/s
☆
F0-03 Maximum running speed 0.250 to F0-04 1.600 m/s
★
F0-04 Rated elevator speed 0.250 to 4.000 1.600 m/s
★
F0-02 is used to set the running speed in the operation panel control mode.
F0-03 is used to set the actual maximum running speed of the elevator. The value must be smaller than the
elevator rated speed (F0-04). For example: If the rated elevator speed F0-04 = 1.750 m/s, and the maximum
speed required during running is1.600 m/s, set F0-03 to 1.600 m/s.
F0-04 is used to set the nominal rated speed of the elevator. The value of this parameter is dependent on the
elevator mechanism and traction motor.
F0-05 Rated elevator load 300 to 9999 1000 kg
★
F0-06 Maximum frequency F1-04 to 99.00 50.00 Hz
★
F0-07 Carrier frequency 0.5 to 16.0 6.0 kHz
★
Group F1: Motor parameters
F1-00 Encoder type
0: SIN/COS encoder
1: UVW encoder
2: ABZ incremental encoder
3: Endat absolute encoder
0 -
★
F1-01 Motor rated power 0.7 to 75.0
Model
dependent
kW
★
F1-02 Motor rated voltage 0 to 600
Model
dependent
V
★
F1-03 Motor rated current 0.00 to 655.00
Model
dependent
A
★
F1-04 Motor rated frequency 0.00 to F0-06
Model
dependent
Hz
★
F1-05 Motor rated speed 0 to 3000
Model
dependent
RPM
★
F1-06
Encoder initial angle
(synchronous motor)
0.0 to 359.9 0 °
★
F1-07
Encoder angle at power-
off (synchronous motor)
0.0 to 359.9 0 °
★
F1-08
Synchronous motor
wiring mode
0 to 15 0 -
★
F1-09
Current lter time
(synchronous motor)
0.0 to 359.9 0 -
★
F1-10
Encoder verication
selection
0 to 65535 0 -
★

 Loading...
Loading...