21. FUNCTION LIST
With this robot, you can use built-in functions (which are built into the robot as an operational function)
and user-defined functions.
User-defined Functions: These are defined in Customizing Mode. (Refer to the operation manual
Functions IV (Customizing) for details about Customizing Mode.)
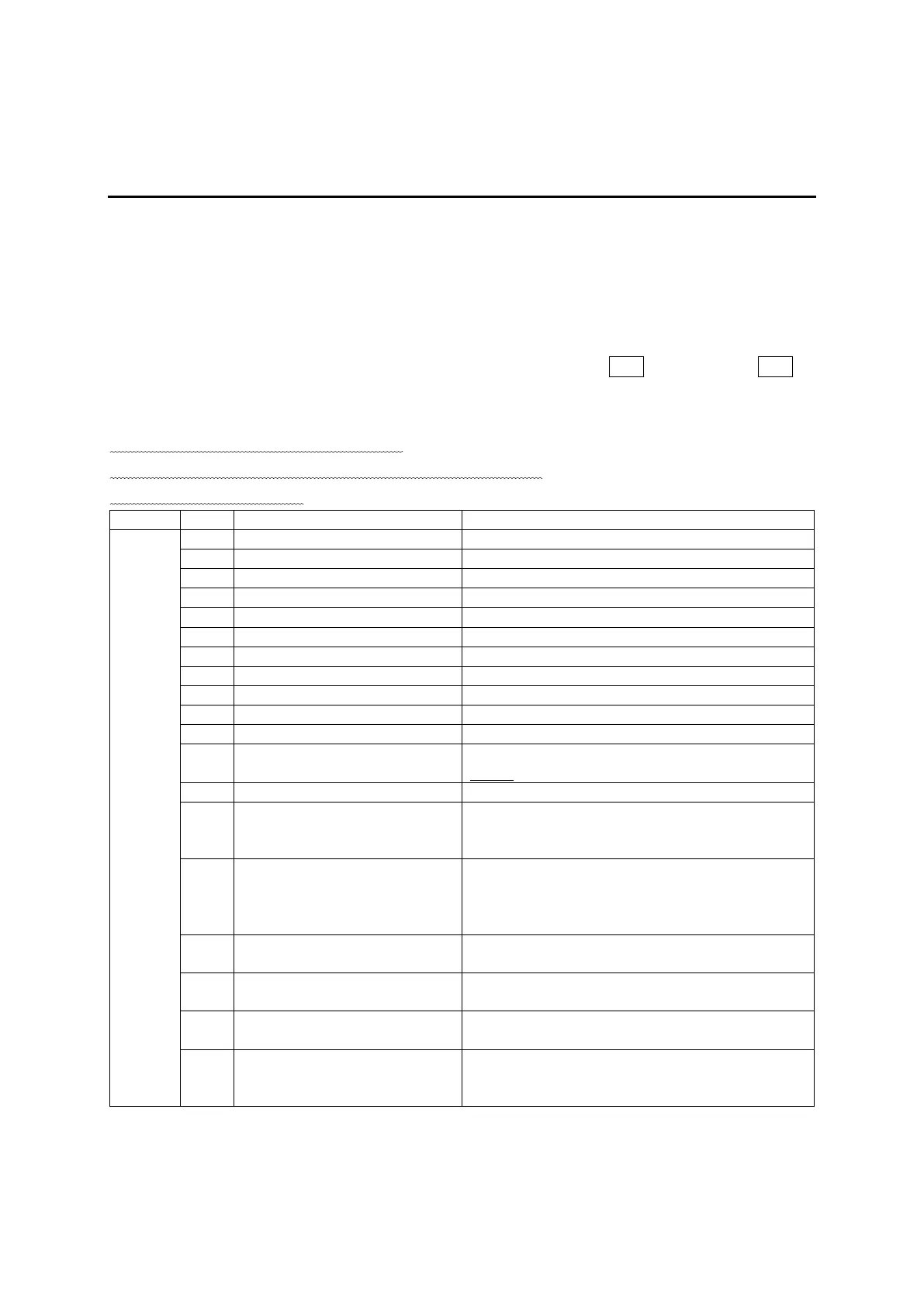
Built-in Functions: In the character and expression entry screen, when [BFunc] is displayed at
the very bottom of the LCD screen (above the F2 key), push the F2
key to view a list of the built-in functions.
x, y: Numerical value or numerical variable
n, m: Round the numeric value up or off to the specified digit(s)
a, b: String or string variable
Robot
System
Currently performed main program number
Currently performed sub program number
Currently performed point number
Current X coordinate [mm]
Current Y coordinate [mm]
Current Z coordinate [mm]
Current R coordinate [deg]
Current command X coordinate [mm]
Current command Y coordinate [mm]
Current command Z coordinate [mm]
Current command R coordinate [deg]
num currentArmH ()
Current coordinate system (1:righty -1: lefty)
NOTE: This is fixed as 1:righty for desktop robots
Data byte count of COM receiving port
num
(num a, num b, num X, num Y,
Function of PTP movement to a designated
absolute position. The robot moves by a PTP
movement to a specified position.
num
moveRPTP
(num a, num b, num X, num Y,
num Z, num R)
Function of PTP movement to a designated
relative position. The robot makes a PTP
movement from the current position to a remote
position by exactly the specified distance.
num isConditionData (n)
Displays whether the specified condition data
number is available (1) or not (0).
str strCenterLCD (a)
Adjusts the strings on the teaching pendant LCD
(centering).
str strRightLCD (a)
Adjusts the strings on the teaching pendant LCD
(right justification).
str strPlusRLCD (a,b)
Teaching pendant LCD: Right priority; items on
the right are displayed in full if there is an
overlap.
114