11.3 Safety Device
With this desktop robot the end user can connect a safety device such as an area sensor or door
switch, etc., when there is a risk of danger due to some part of the body entering the robot’s work area.
I/O-S is an interface for connecting such a safety device. If you want to connect a safety device, do so
as shown in the diagram below, and perform the risk assessment on your side. A stop performed via a
safety device connected to the robot is classified as a category 2 emergency stop.
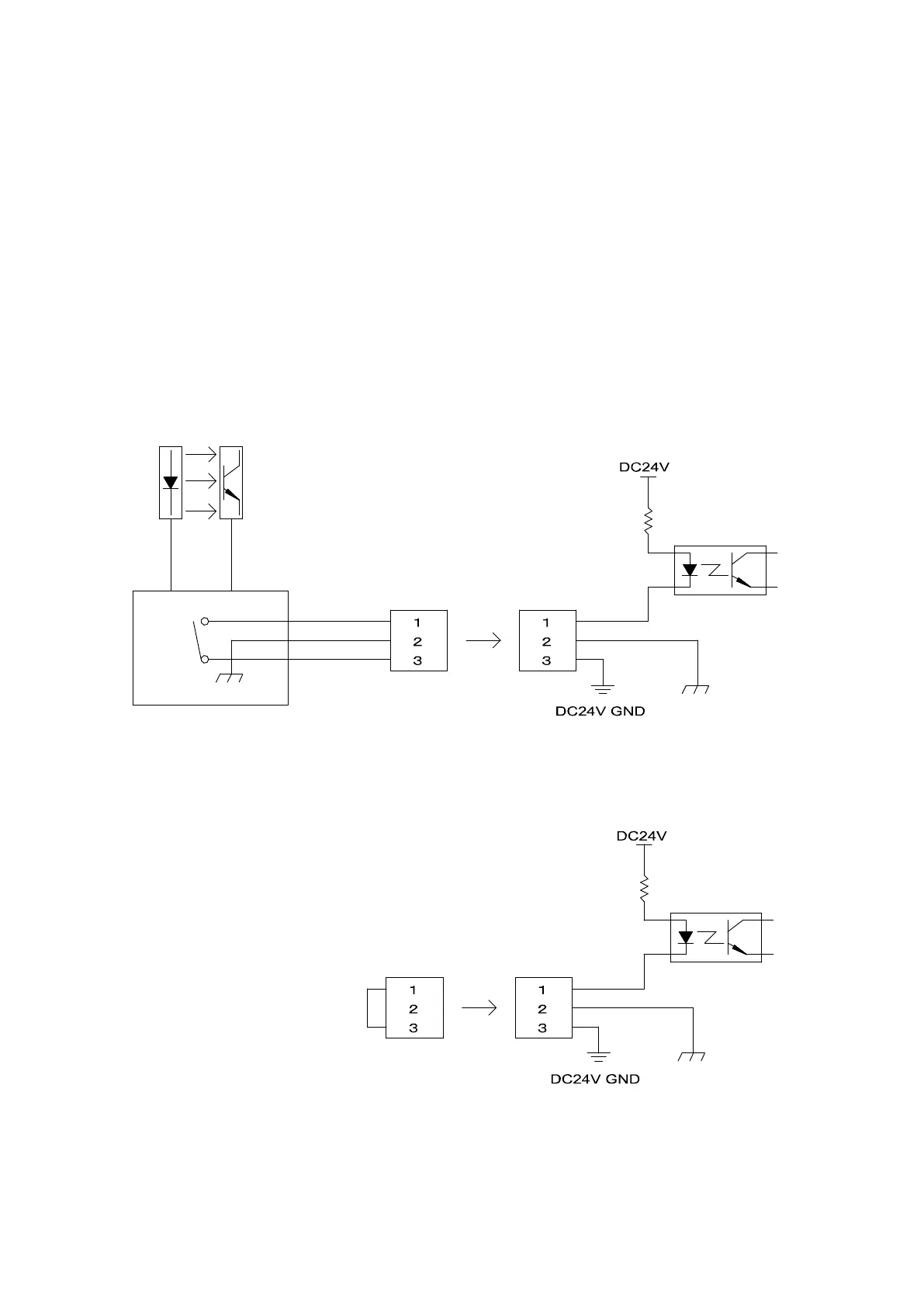
When setting up a safety device (Example: Area Sensor)
Connect the safety device to the robot with the I/O-S connector by attaching the lead wires properly to
the corresponding terminals of the I/O-S connector. For further information, refer to “11.2 Pin Nos.
(Robot Side)” and the safety device’s instruction manual.
When not connecting a safety device
I/O-S on the
robot side
Connector type
SRCN6A13-3P (Japan Aviation Electronics Industry)
Ground
I/O-S on the
robot side
Connector type:
SRCN6A13-3P (Japan Aviation Electronics Industry)
Ground
Connect the I/O-S connector with the two lead wires short-circuited.
76
 Loading...
Loading...

