cONTROLS AdjUSTmENTS
7
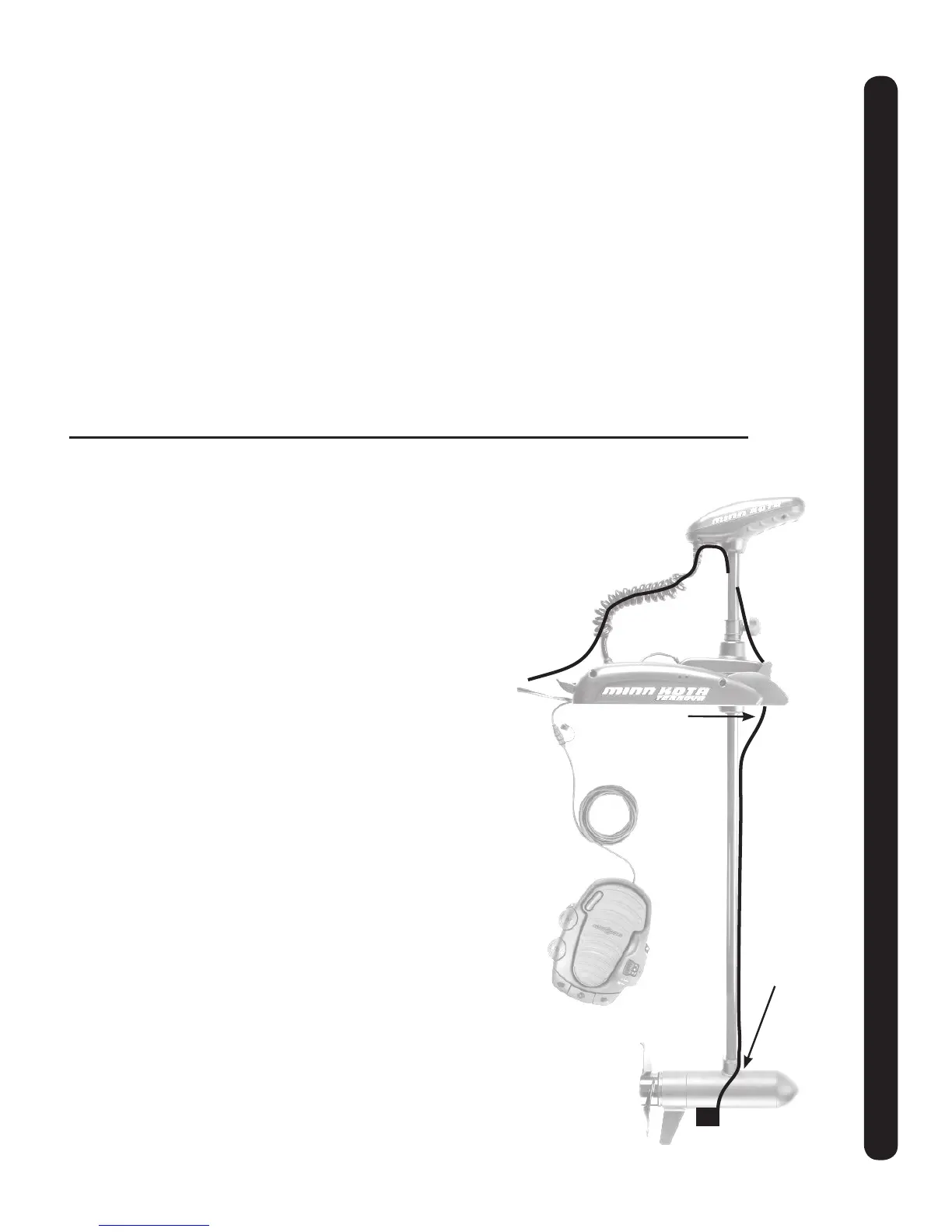
Leave slack .
Tie wrap cable.
AUTOPILOT™ CONTROLS: AUTOPILOT ON EQUIPPED MOTORS ONLY
The MINNKOTA AutoPilot uses a magnetic compass and a microprocessor chip to keep the trolling motor pointed in
the direction you want to go. Each time the wind or water current moves the boat off course, the AutoPilot senses the
change and steers itself back to the original heading. The AutoPilot direction is set every time a steering change is
made. To change direction, steer until the control head points to the desired course. The AutoPilot will pull the bow of
the boat around and correct automatically until the boat is moving in the direction you chose.
1. This unit has an automatic steering shutdown for safety. In conditions where an obstruction prevents the trolling motor
from turning, or in extremely windy conditions, the automatic steering may stop. Any steering input on the foot pedal
will reset the system to normal.
2. When the AutoPilot is on and the trolling motor is pulled out of the water to the stow position, the steering motor will
continue to run until the motor is stowed properly. Once the motor is stowed properly, AutoPilot will turn off and the
system ready indicator will go off.
3 This unit uses a magnetic compass to detect direction of travel. The compass can be adversely affected by magnets or
large, ferrous metal objects near ( within 12” of ) the trolling motor control head.
4. After steering to a new direction, there is a short delay before the direction is locked in to allow the compass to stabi-
lize.
5. Obstructions on the propeller may cause excessive vibration of the motor head. This vibration can cause the compass
to wander and erratic steering to occur. Clear the obstruction to return the motor to normal operation.
6. When broad speed changes are made, the motor heading may change slightly. This is normal.
DEPTH ADJUSTMENTS:
Firmly grasp and hold the composite shaft above the PowerDrive
housing. Loosen the depth/drive collar knob until the shaft slides
freely. Raise or lower the motor to the desired depth. Tighten the
depth/drive collar knob to secure the motor in place.
EXTERNAL TRANSDUCER INSTALLATION:
Transducer cables should be routed through the coil cable and han-
dle as shown. Leave enough slack for proper deployment and
retraction. Mount transducer according to transducer instructions.
NOTE: An external transducer is not included with your trolling
motor.

 Loading...
Loading...









