9 Servo Parameter Objects
9 - 40
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
• Select the warning type to be output by Warning Output 1.
Explanation of Settings
Refer to 12-2 Warnings on page 12-5.
• Select the warning type to be output by Warning Output 2.
• Refer to the Warning Output Selection 1 (3440 hex) for the object setting method.
Refer to 12-2 Warnings on page 12-5.
• Set the positioning completion range to output Positioning Completion Output 2 (INP2).
• The Positioning Completion Output 2 (INP2) is not affected by the position commands. It is ON as
long as the position error is below the set value.
• The default unit is command units, but Position Setting Unit Selection (3520 hex) can be used to
convert to external encoder units. However, note that the unit for the Following error window (6065
hex) will change as well.
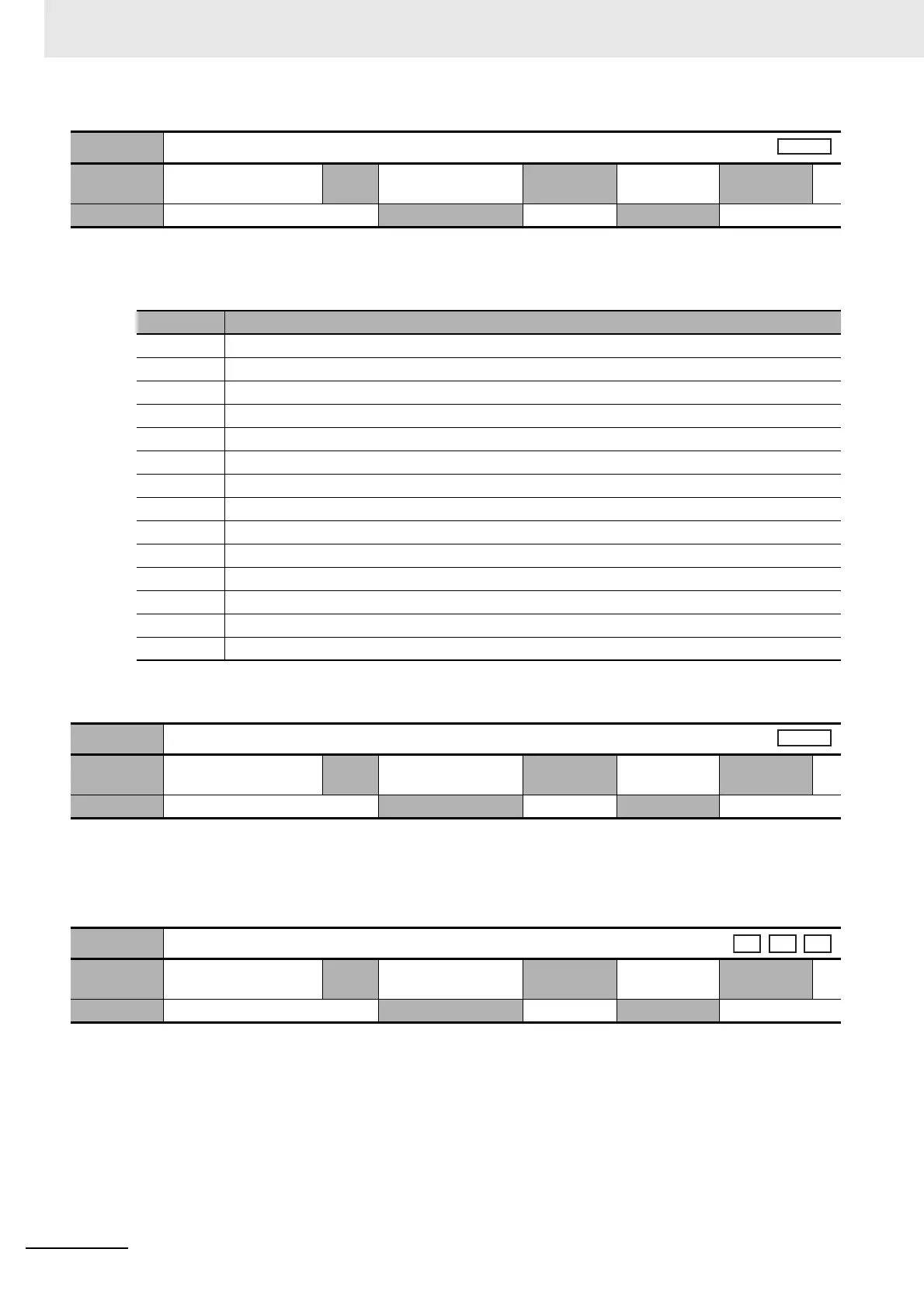
3440 hex
Warning Output Selection 1
Setting
range
0 to 13
Unit
–
Default
setting
0 Data
attribute
A
Size 2 bytes (INT16) Access RW PDO map Not possible
Set value Description
0 Output for all warnings.
1 Overload warning
2 Excessive regeneration warning
3 Reserved (Do not use.)
4Fan warning
5 Reserved (Do not use.)
6 Reserved (Do not use.)
7 Vibration detection warning
8 Life expectancy warning
9 External encoder error warning
10 External encoder communications error warning
11 Data setting warning
12 Command warning
13 EtherCAT communications warning
3441 hex
Warning Output Selection 2
Setting
range
0 to 13
Unit
–
Default
setting
0 Data
attribute
A
Size 2 bytes (INT16) Access RW PDO map Not possible
3442 hex
Position Completion Range 2
Setting
range
0 to 262,144
Unit
Command unit
Default
setting
10 Data
attribute
A
Size 4 bytes (INT32) Access RW PDO map Not possible
csp
pp
hm
 Loading...
Loading...
