10 Operation
10 - 2
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
10-1 Operational Procedure
Turn ON the power supply after the correct installation and wiring to check the operation of the
individual motor and drive.
Then make the function settings as required according to the application of the motor and drive.
If the user objects are set incorrectly, there is a risk of unexpected motor operation, which can be
dangerous. Set the objects properly according to the setting methods in this manual.
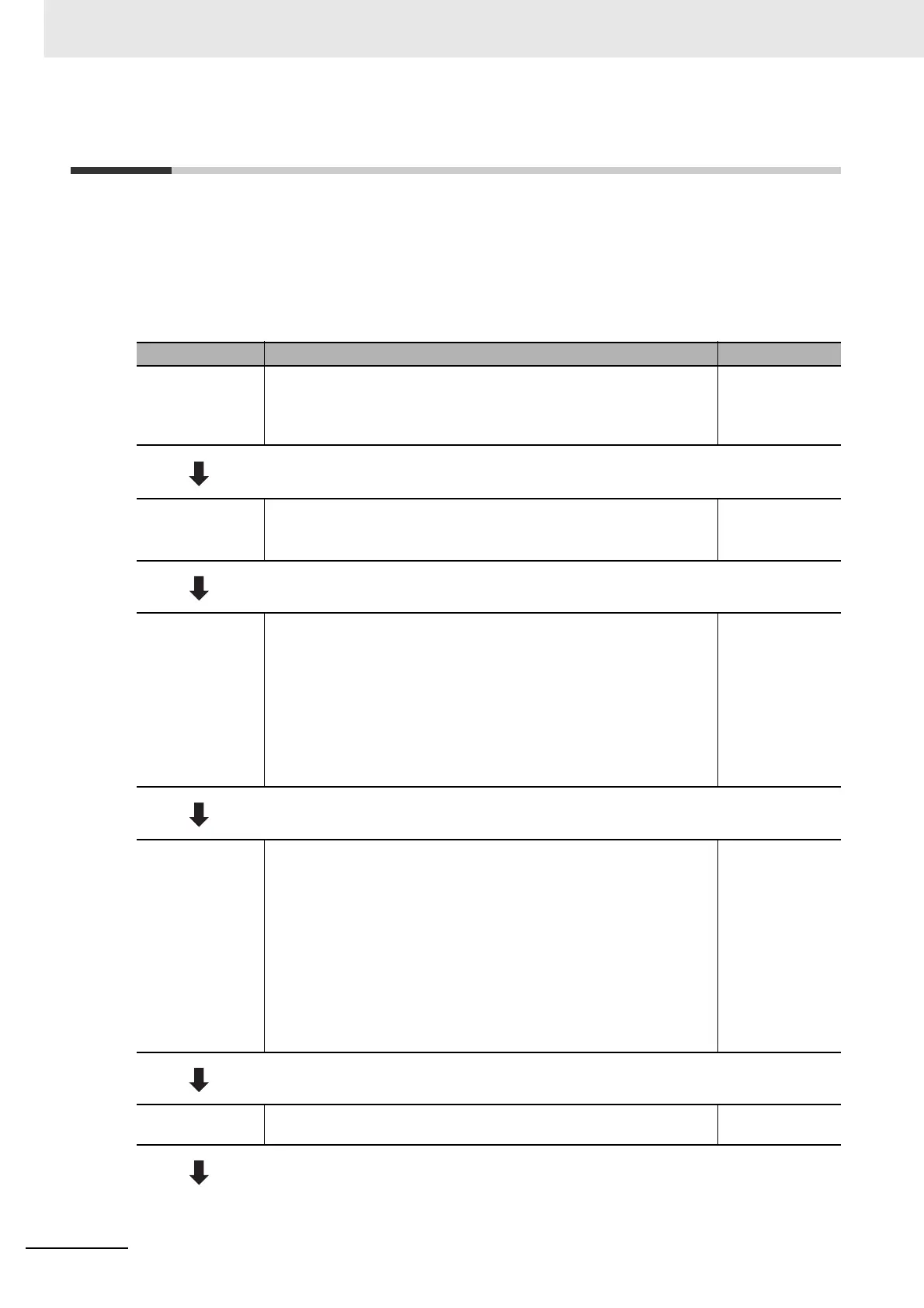
Item Contents Reference
Mounting and
installation
Install the motor and drive according to the installation conditions.
However, do not connect the motor to the mechanical system. First,
connect the motor to a minimal structure of linear sliders for checking
no-load operation.
Section 4, 4-1
Wiring and
connections
Connect drive to the power supply the motor and peripheral equipment.
Specified installation and wiring conditions must be satisfied,
particularly for conforming the apparatus to the EC Directives.
Section 4, 4-2
Preparing and
setting for
Operation
Check the necessary items and then turn ON the power supply.
Check on the display to see whether there are any internal errors in the
drive.
Configure the drive for Linear Motor, external scale specification, and
magnetic pole detection settings in advance. With the default settings,
the Servo Drive will not operate due to an error.
Turn ON the power supply again, and check to see if protective
functions, such as the STOP, Drive prohibition inputs, and safety
functions, respond as expected.
Section 10, 10-2
Initializing Linear
Motor settings
Use the Sysmac Studio or CX-Drive to follow the steps below. Section 10, 10-3
1 Set the motor constant, magnetic pole position estimation method,
external encoder type, resolution, and other data according to the
motor model and external encoder in use and transfer the set data
to the Servo Drive.
2 The automatic setting function automatically determines the
current loop gain and the encoder direction by driving the motor
and stores that information in the Servo Drive.
3 On the confirmation screen, check the linear slider operation and
the amount of increase/decrease of the current value and its
direction.
Function settings Set the objects related to the functions required for application
conditions.
Section 9
 Loading...
Loading...
