9 Servo Parameter Objects
9 - 50
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
• If the motor speed exceeds the set value during an immediate stop resulting from an error, an
Overspeed 2 Error (Error No. 26.1) will occur.
• The overspeed detection level setting is 1.2 times the maximum motor speed if this object is set to 0.
• This object should normally be set to 0. The setting should be changed only when it is necessary to
lower the overspeed detection level.
For details, refer to 12-3-2 Immediate Stop Operation at Errors on page 12-11.
• Set the initialization time after turning ON the power supply to the standard 1.5 seconds plus the
specified value.
Refer to 3-1-9 Control Output Details on page 3-12 for the details at power ON.
• Set the compensation gain for disturbance force.
For details, refer to 11-8 Disturbance Observer Function on page 11-28.
• Set the filter time constant for disturbance force compensation.
For details, refer to 11-8 Disturbance Observer Function on page 11-28.
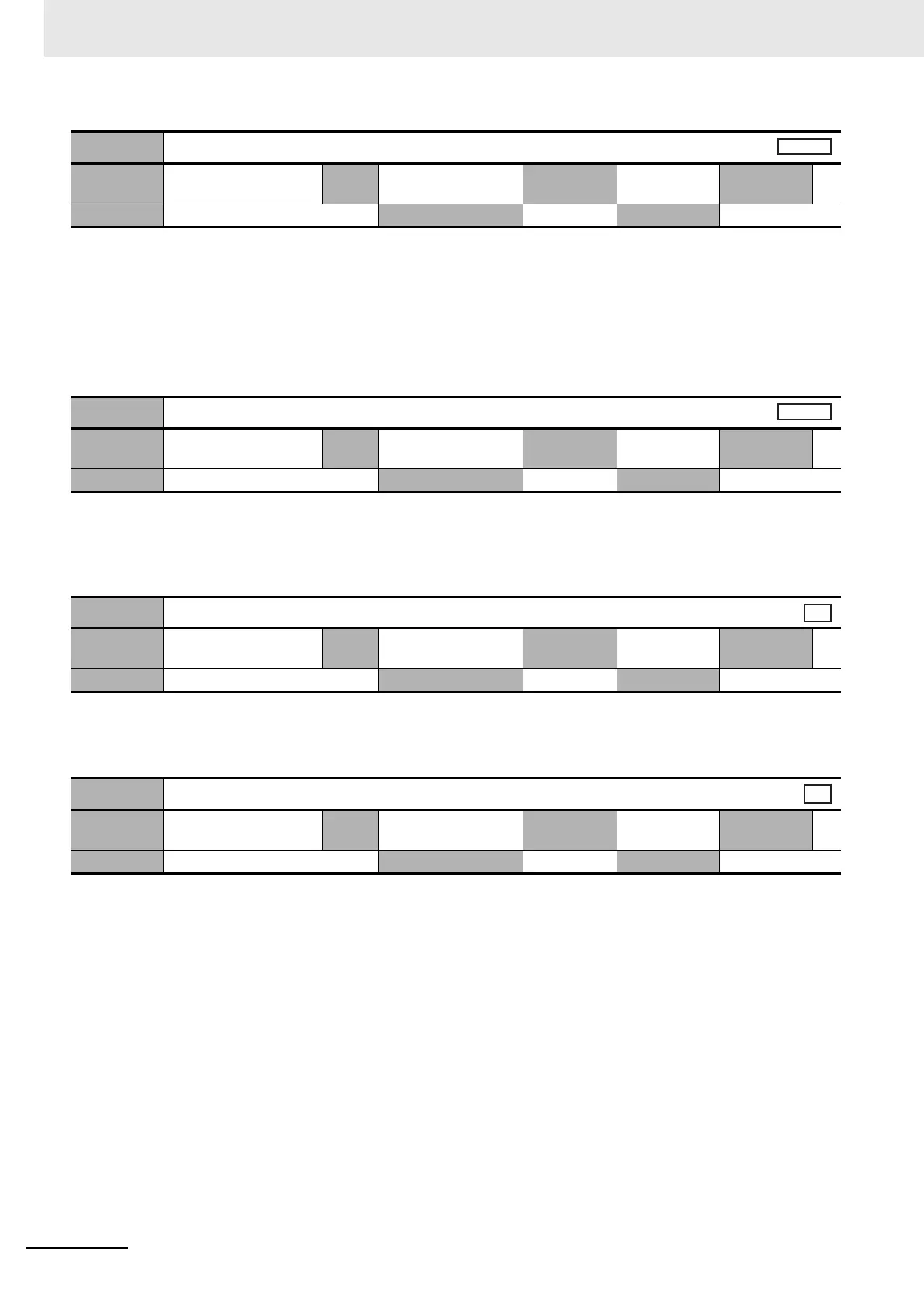
3615 hex
Overspeed Detection Level Setting at Immediate Stop
Setting
range
0 to 20,000
Unit
mm/s
Default
setting
0 Data
attribute
A
Size 2 bytes (INT16) Access RW PDO map Not possible
3618 hex
Power Supply ON Initialization Time
Setting
range
0 to 100
Unit
0.1 s
Default
setting
0 Data
attribute
R
Size 2 bytes (INT16) Access RW PDO map Not possible
3623 hex
Disturbance Force Compensation Gain
Setting
range
–100 to 100
Unit
%
Default
setting
0 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
3624 hex
Disturbance Observer Filter Setting
Setting
range
10 to 2,500
Unit
0.01 ms
Default
setting
53 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
csp
csp
 Loading...
Loading...
