A - 69
Appendices
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
A-1 CiA402 Drive Profile
A
A-1-12 Servo Drive Profile Objects
• In Cyclic synchronous position mode (csp) or Cyclic synchronous velocity mode (csv), the value of
this object is added to the Torque Feed-forward Gain (3112 hex) for use as the torque feed-forward
input value in controlling the torque.
• In Cyclic synchronous torque mode (cst), the value of this object is used as the offset value of the
Target torque (6071 hex) to control the torque.
• This object sets and controls the latch function.
• There are two channels, Latch 1 (bits 1 to 7) and Latch 2 (bits 8 to 15).
• Bits 0 and 8 execute latching when changed from “0” to “1”.
• To change the settings, set bit 0 or 8 to “0” and then to “1” again.
• Latching is disabled in the following cases.
When communications is in the Init state.
When the Statusword (6041 hex) bit 9 (remote) is 0 (local).
For details on the latch function, refer to 7-11 Touch Probe Function (Latch Function) on page 7-39.
Explanation of Settings
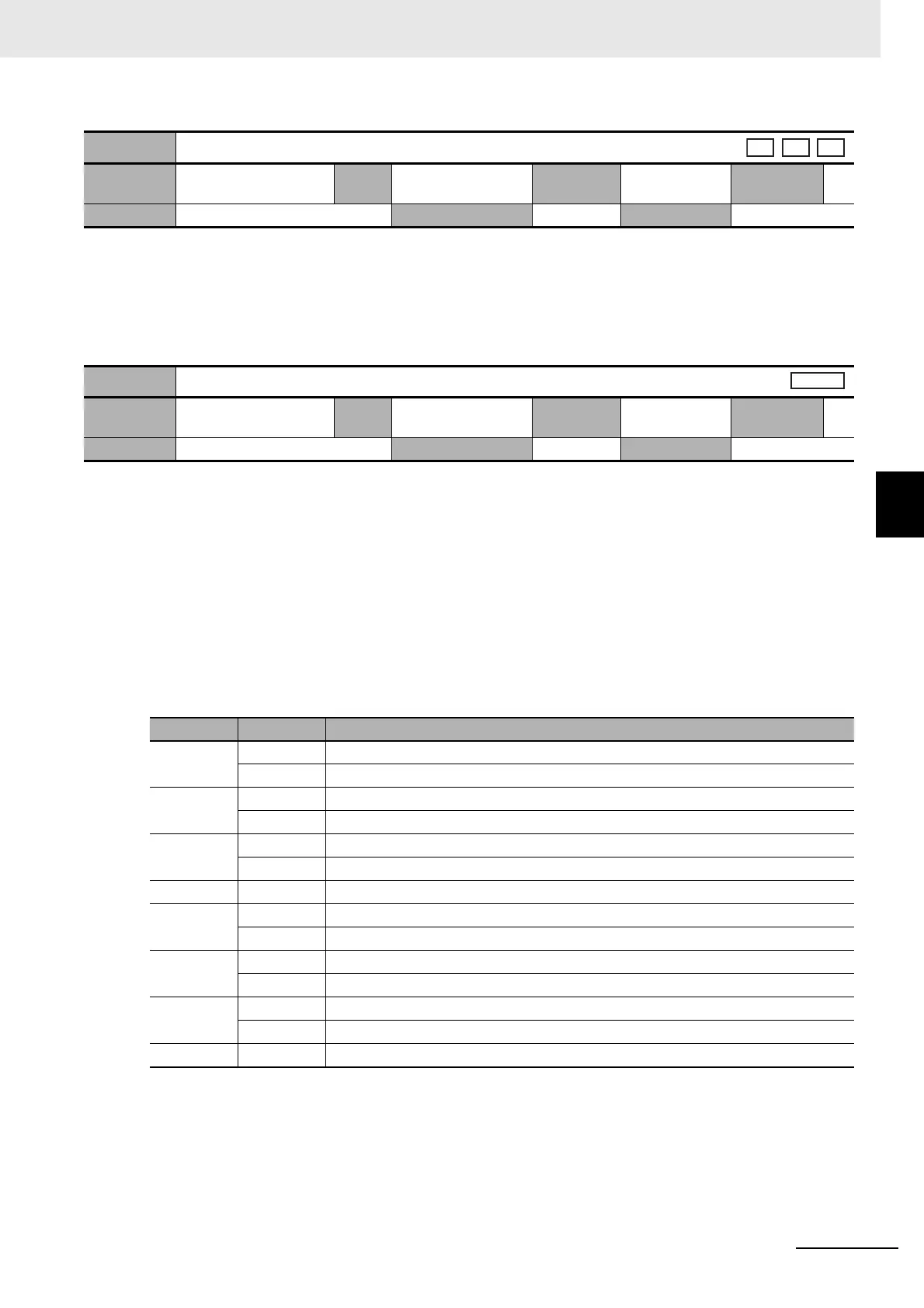
60B2 hex
Torque offset
Setting
range
–5,000 to 5,000
Unit
0.1%
Default
setting
0 Data
attribute
A
Size 2 bytes (INT16) Access RW PDO map Possible
60B8 hex
Touch probe function (Latch function)
Setting
range
–
Unit
–
Default
setting
0 Data
attribute
A
Size 2 bytes (U16) Access RW PDO map Possible
Bit Value Description
0 0 Latch 1 is disabled.
1 Latch 1 is enabled.
1 0 Trigger first event (Latch on the first trigger).
1 Continuous (Latch continuously on trigger input).
2 0 Latch on the signal selected in the Touch Probe Trigger Selection (3758 hex).
1 Latch on the encoder’s phase-Z signal.
3 to 7 0 Reserved (always set to 0).
8 0 Latch 2 is disabled.
1 Latch 2 is enabled.
9 0 Trigger first event (Latch on the first trigger).
1 Continuous (Latch continuously on trigger input).
10 0 Latch on the signal selected in the Touch Probe Trigger Selection (3758 hex).
1 Latch on the encoder’s phase-Z signal.
11 to 15 0 Reserved (always set to 0).
csp cstcsv
 Loading...
Loading...
