Motion sequence and axes Section 1-8
23
1-7-4 Multi-tasking example
In the example 1, there are two high-priority processes, 13 and 14. The two HT
periods are reserved for these processes, one for processes 13 and one for
processes 14. The low-priority processes 3, 2, 1 and 0 are executed in the LT
period, one process per Cycle time here set to 1.0ms.
In the middle example, there is only one high-priority process, 14. Both HT
periods are reserved for this process. The low-priority processes, 3, 2, 1 and 0
are executed in the LT period, one process per cycle time.
In the lower example, there are no high-priority processes. Therefore, the HT
periods can be used for the low-priority processes. The LT period is also used
for the low-priority processes.
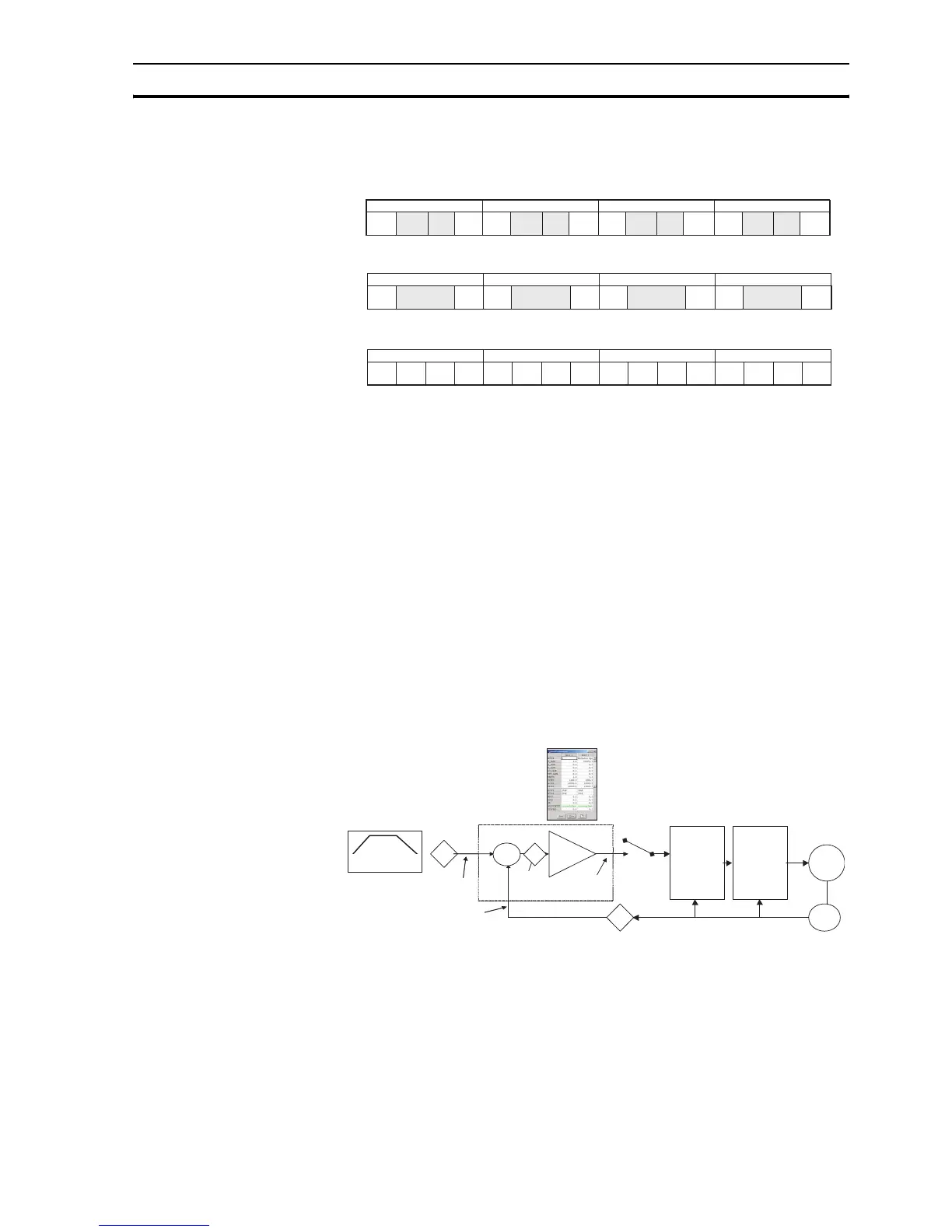
1-8 Motion sequence and axes
Motion sequence is the part of the CJ1W-MCH72 that controls the axes. The
actual way that the motion sequence operates depends on the axis type. The
axis type can be set and read by the parameter ATYPE. At start-up the
Trajexia system automatically detects the configuration of the axes.
• The default value for the parameter ATYPE for MECHATROLINK-II axes is
40 (MECHATROLINK-II position).
• The default value for the parameter ATYPE for the Encoder Interface is 44
(incremental encoder).
2
3
14
13
14
13
143
COMS.
1ms
142
COMS. COMS.
1ms
141
1ms
140
(c/l)
1ms
COMS.
321
COMS.
1ms
0
(c/l)
32
COMS. COMS.
1ms
10
(c/l)
3
COMS.
1ms
210
(c/l)
1ms
1
3
COMS.
1ms
2
COMS. COMS.
1ms
1
1ms
0
(c/l)
1ms
COMS.
14
13
14
13
• block
•
Profile generatorProfile generator
+
-
Position loop
Demanded
position
Measured
position
Following
error
Speed
command
+
-
Position loop
Demanded
position
Measured
position
Following
error
Speed
command
Speed loop
ON
OFF
Torq ue
loop
M
E
AXIS PARAMETER
Servo Drive
 Loading...
Loading...









