Figure 4-7
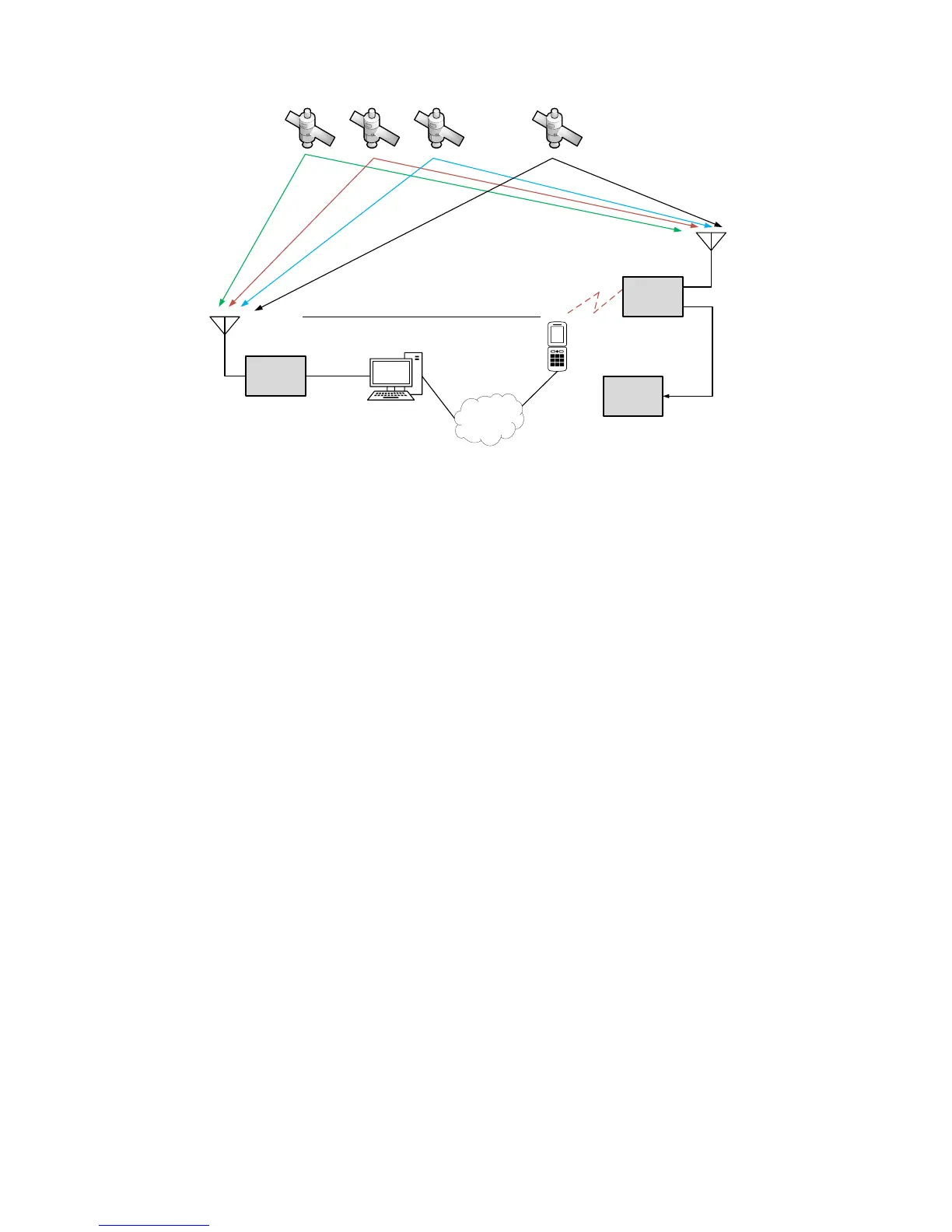
A smartphone can be used to connect RTK rover with RTK base over Internet instead of using a pair of
telemetry radios for non-line-of-sight real-time precision guidance application as shown in figure 4-7.
In this case user can setup an Alpha RTK base as described previously with figure-4-4, and with Alpha
RTK rover also connecting pin-3 of the 6-pin connector to the real-time controller’s UART input for
sending the NMEA output messages to the real-time controller.
 Loading...
Loading...


