Chapter 3: System Specifications
Physical Specifications – Library
Scalar i6000 Planning Guide 59
• Redundant power is allowed in the control module, DREM and
HDEM. For more details on power, see
Electrical Specifications on
page 51.
• HDEMs cannot contain drives.
• HDEMs use different power sources than other modules. They can
also supply power to other HDEMs in the library but not to other
expansion modules.
• All control modules come standard with a 24-slot I/E station.
Control modules cannot be upgraded to a 72-slot I/E station.
• Dual-robot libraries can contain up to sixteen (16) 24-slot or
fourteen (14) 72-slot I/E stations.
• Dual-robot library partitions cannot contain more than 240 I/E slots
total.
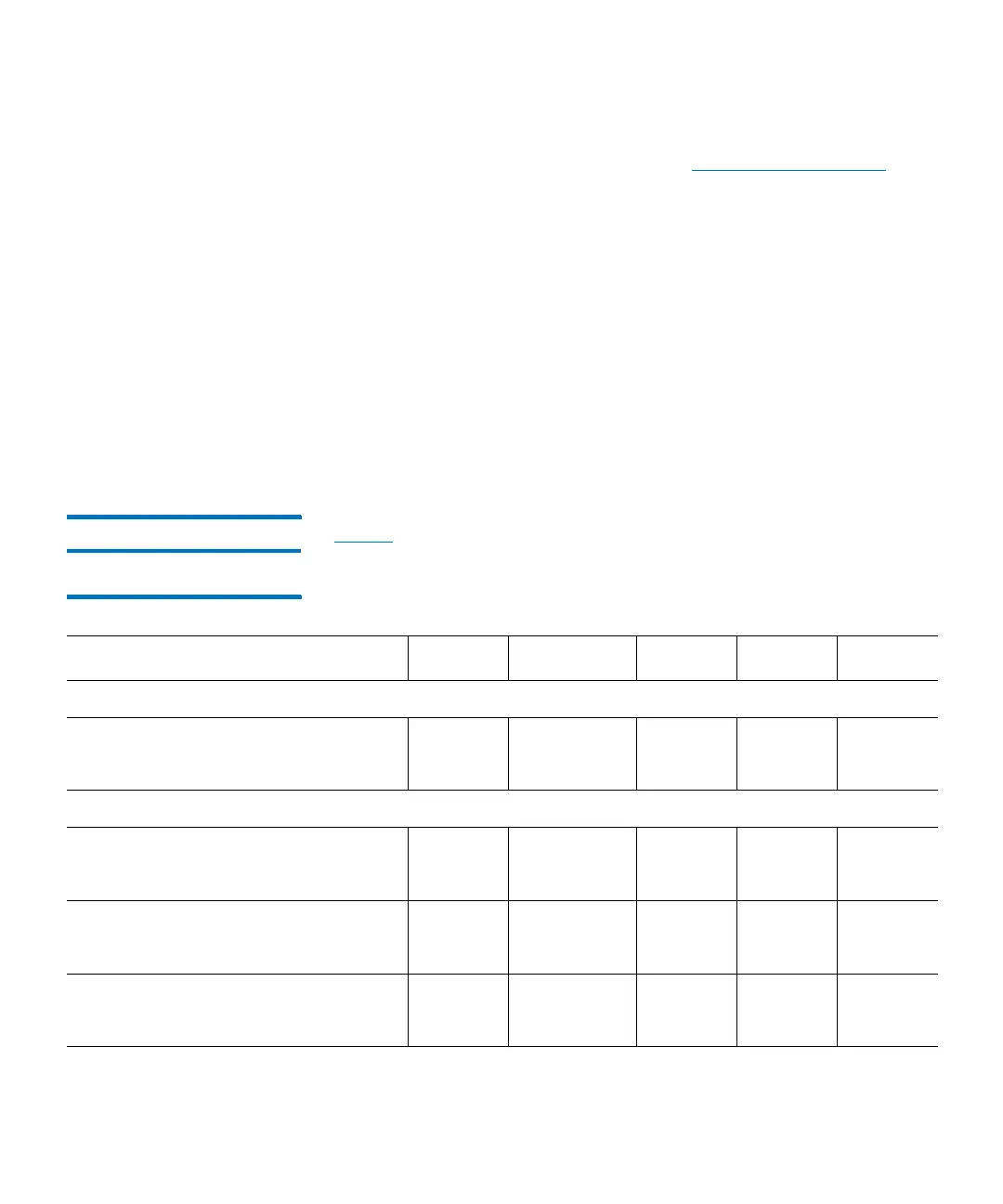
Basic Building Blocks Tab l e 8 provides specifications for the common building blocks to help
you calculate your specific configuration.
Table 8 Basic Building Blocks
Components Weight Point Load Height Width Depth
Details specific to single-robot configuration
CM – fully loaded: robot, drives,
redundant power, 24-slot I/E, media
899 lb
409 kg
71.5 lb/in.
2
5.0 kg/cm
2
77.4 in
196.6 cm
24.3 in
61.7 cm
38.3 in
97.3 cm
Details Specific to Dual-Robot Configuration
CM – Fully loaded: no robot, drives,
redundant power, 24-slot I/E, media
897 lb
408 kg
71.4 lb/in.
2
5.0 kg/cm
2
77.4 in
196.6 cm
24.3 in
61.7 cm
38.3 in
97.3 cm
LPM – Fully loaded: robot, media 623 lb
283 kg
49.6 lb/in
2
3.5 kg/cm
2
77.4 in
196.6 cm
23.6 in
59.9 cm
38.3 in
97.3 cm
RPM – Fully loaded: drives, redundant
power
820 lb
373 kg
65.2 lb/in
2
4.6 kg/cm
2
77.4 in
196.6 cm
23.6 in
59.9 cm
38.3 in
97.3 cm
 Loading...
Loading...














