INTERFACE MANUAL
3.2 Connecting Encoder Cable
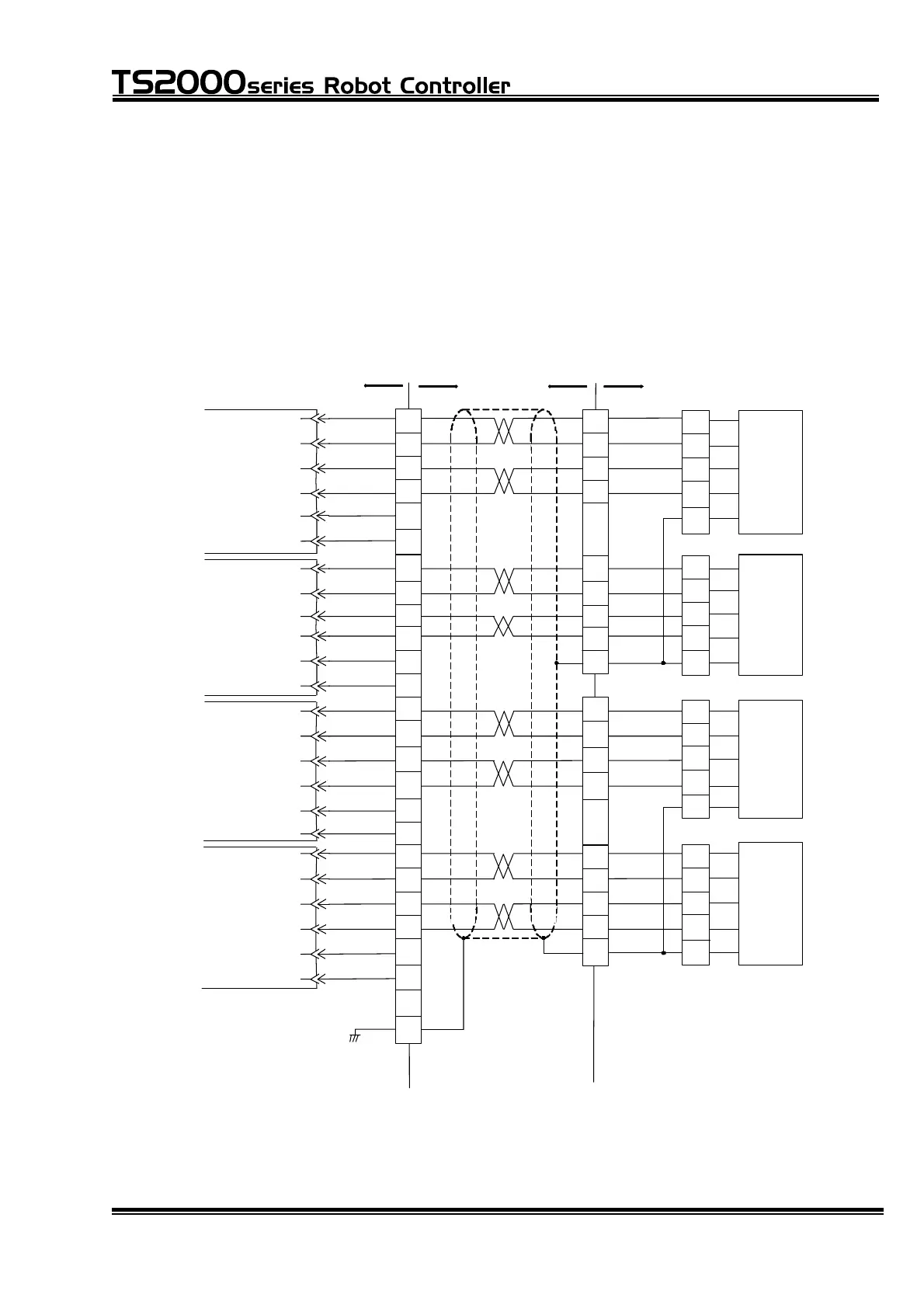
3.2.1 Connecting Encoder Cable
To connect the encoders to the TS2000/TS2100 digital servo printed board
(X8HW,X8HS), use the attached cables.
TS2000/TS2100 robot controller
1
14
2
3
15
4
5
FG
CN3
18
7
8
21
16
17
20
6
19
9
22
10
23
11
12
24
25
13
Case
1
2
3
4
1
2
3
4
1
2
3
4
5
6
7
8
1
2
3
4
5
6
7
8
9
J6B
9
J7B
Axis 1
encoder
Axis 2
encoder
Axis 4
encoder
Axis 3
encoder
5
6
1
2
3
4
5
6
1
2
3
4
5
6
6
5
1RQ/SD
1RQ/SD*
P5V
LG
2RQ/SD
2RQ/SD*
P5V
LG
FG
3RQ/SD
3RQ/SD*
P5V
LG
4RQ/SD
4RQ/SD*
P5V
LG
FG
Encoder
cable
Robot
X8HS(1)
ENCA
X8HS(1)
ENCB
X8HS(2)
ENCA
X8HS(2)
ENCB
1
3
8
9
J1B
1
3
8
9
J2B
1
3
8
9
J3B
1
3
8
9
J4B
15
15
15
15
X8HW(1)
ENC
X8HW(2)
ENC
Fig. 3.2 Connection of encoder cables
For the encoder cable connection, see the Installation & Transport Manual.
STE 71367
– 20 –

 Loading...
Loading...





