Use the following sections as guide:
2.1.2 Safety Functional
2.1.3 Visual Inspection
3.2 Control Box
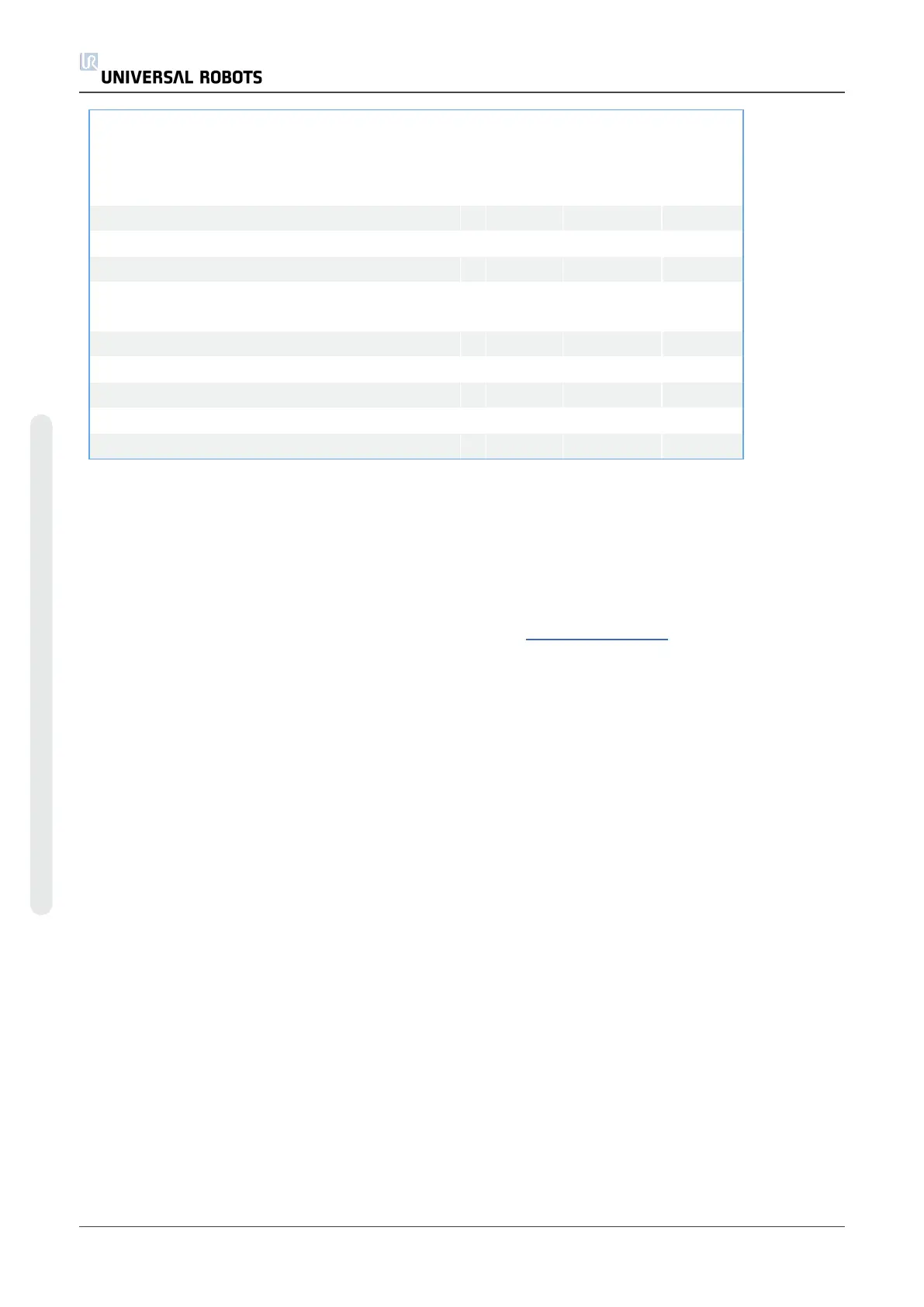
Monthly Bi-annually Annually
Check Emergency stop on Teach Pendant F X
Check Backdrive mode F X
Check Freedrive mode F X
Check safety inputs and outputs
(if connected)
F X
Check Teach Pendant cable V X
Check and clean air filters on Control Box V X
Check terminals in Control Box F X
Check electrical grounding 1< Ω to Control Box F X
Check main power to Control Box F X
V = Visual inspection F = Functional inspection
4.1.2. Safety Functions
The robot safety functions must be tested at least once a year to ensure correct function. The
following tests must be performed.
• Backup data from the storage device - See section 4.4 Backup of data
• Test that the Emergency Stop button on the Teach Pendant functions:
• Press the Emergency Stop button on the Teach Pendant.
• Observe that the robot stops and turns off the power to the joints.
• Power on robot again.
• Test Freedrive mode:
• Unmount attachment or set TCP/Payload/CoG according to tool specifications.
• Set the robot in Free drive mode by holding the black Freedrive button on the back of
the Teach Pendant.
• Move the robot to a position stretched out horizontally to the edge of its workspace.
• Monitor that the robot maintains its position unsupported while the Freedrive button
is still pressed.
• Test Backdrive mode:
If the robot is close to collision, the BACKDRIVE function can be used to move the robot to
a safe position before initializing.
• Press ON to enable power, state will change to Idle.
• Press and hold Freedrive -> status will change to BACKDRIVE.
• Move the robot by hand as in Freedrive.
UR5 4 Service Manual
4.Recommended Inspection Activities
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...









