* When using a joint in a different location i.e. UR5 base as UR5 Elbow, it may be necessary to
change ID, connect all joints electrically, turn the joint 180 degrees in low level control by using
the Move Tab Up/Down function, before mechanically assembling the robot.
The robot then needs to be zero positioned or dual robot calibrated - Instructions for calibrating a
joint
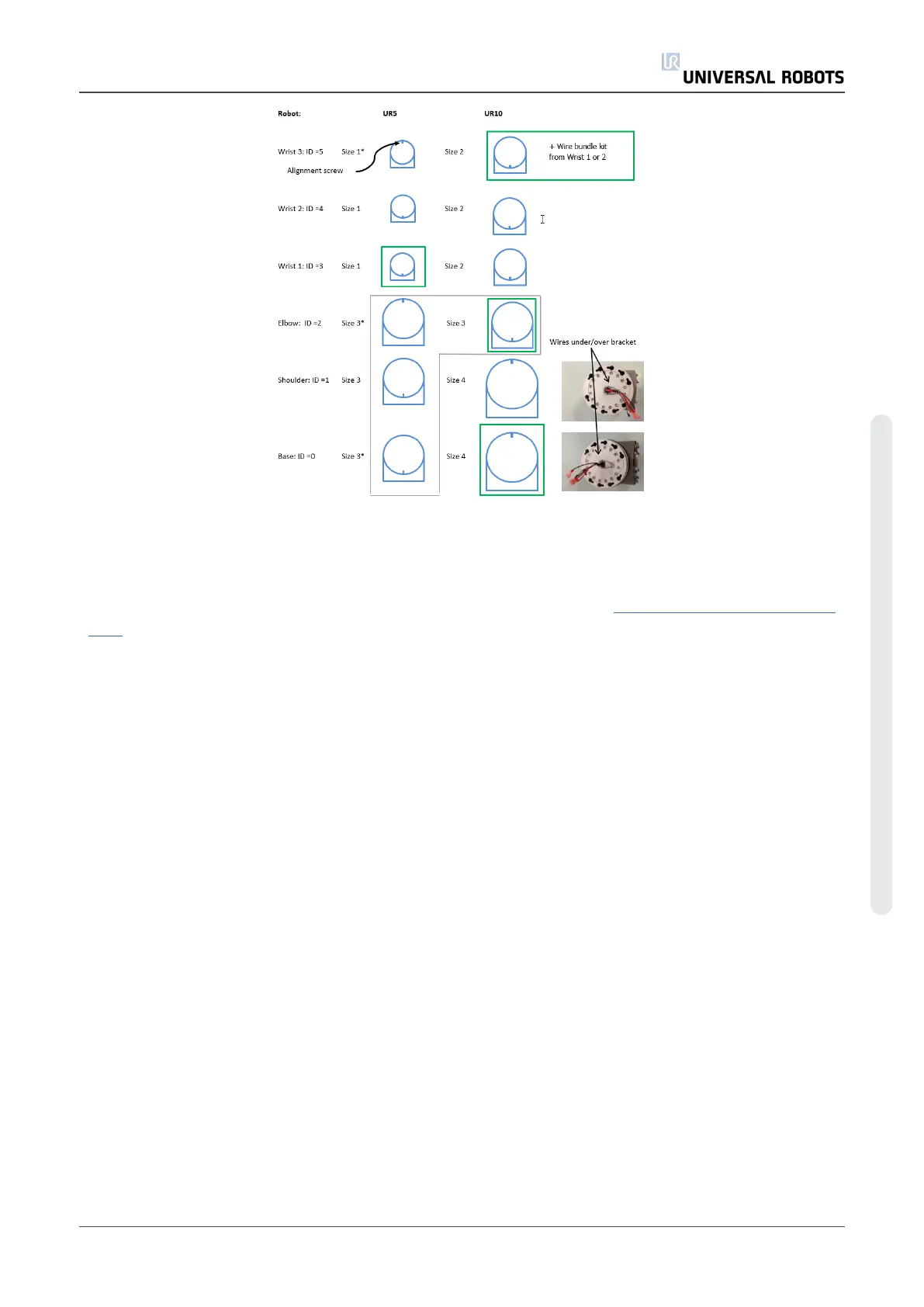
5.2.19. Wire Bundle Installation Guide
General
As well as the Wire bundle kit for the correct joint size, the Following ESD approved tools are
recommended for this replacement:
• Tool for pressing in the pins
• Small flat nose plier
• Cable tie tension and cutting tool
• Small flathead screwdriver
• Tweezers
• Crimping tool for cable shoes
Time expected: 20min (joint disassembly time not included)
Size 1 – part number: 103501
Service Manual 45 UR5
5.Service and Replacement of parts
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...









