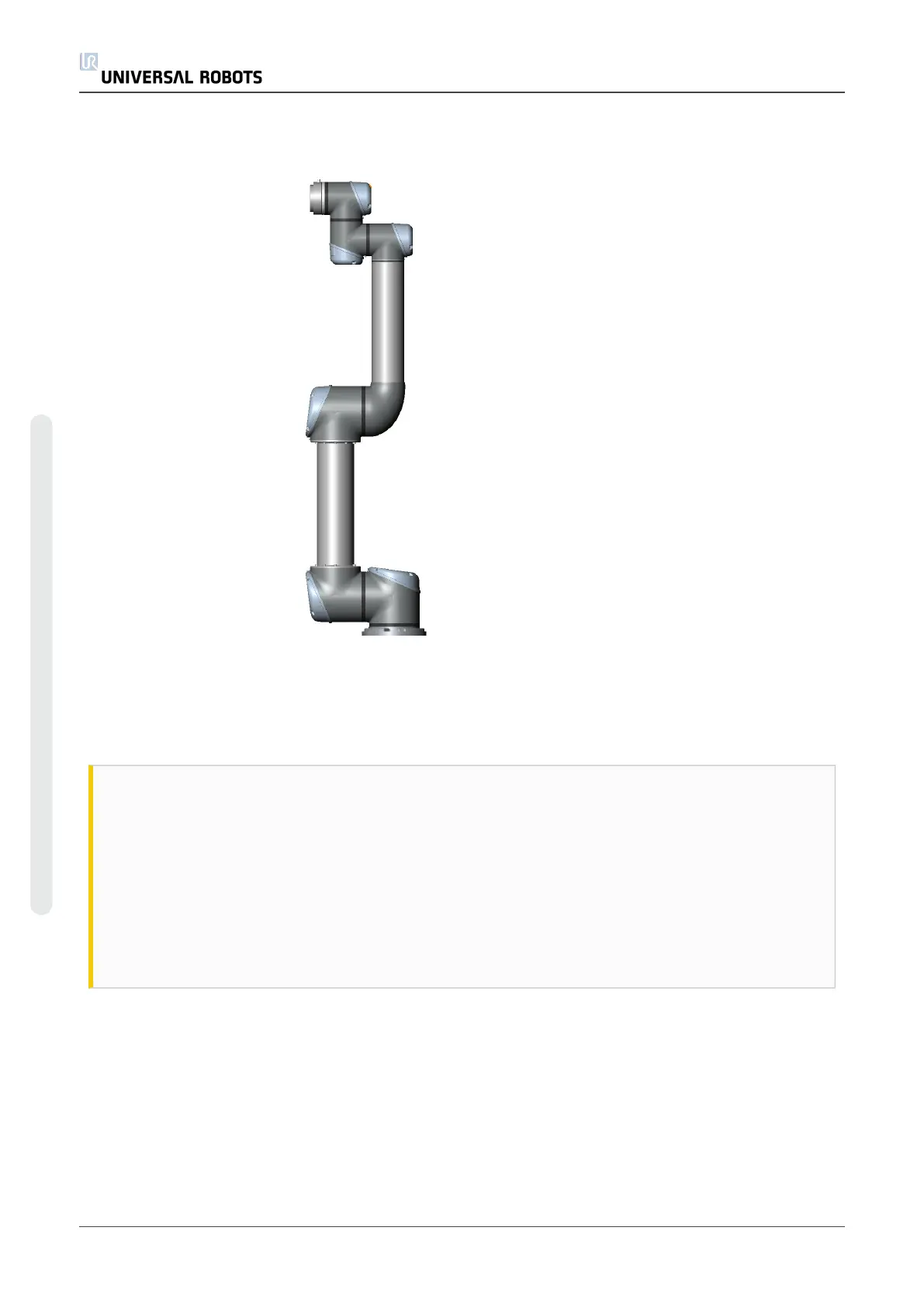
5.2.2. Robot Arm Configuration
Tool flange Tool flange – Wrist 3 joint
Size 1 Wrist 3 joint – Wrist 2 joint
Size 1 Wrist 2 joint – Wrist 1 joint
Size 1 Wrist 1 joint – Lower arm
Elbow Elbow counterpart – Elbow joint
Size 3 Elbow joint – Upper arm
Size 3 Upper arm – Shoulder joint
Size 3 Shoulder joint – Base joint
Base
Base Joint – Base Mounting
Bracket
5.2.3. Brake Release
If required, the brake on a joint can be released without power connected.
CAUTION
Before releasing a brake, it is extremely important to dismount any dangerous
parts to avoid any hazardous situations.
If releasing the brake on Base joint, Shoulder joint or Elbow joint, it is important to
make proper mechanical support prior to releasing the brake.
Always make sure personnel are in no risk when releasing the brake.
Do not move the joint more than is necessary. Not more than 160 degrees to
ensure the robot can find its original physical position.
Procedure for releasing the joint
1. Shut down Controller.
2. Remove blue lid on joint.
3. Push brake pin down to release, joint can then be rotated.
UR5 18 Service Manual
5.Service and Replacement of parts
Copyright © 2009–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...









