Page 10
2.5.4 Speed feedback
The traction motors control is based upon the motor speed feedback. The speed trans-
ducer is an incremental encoder, with two phases shifted at 90°. The encoder can be of
different types :
- power supply: +5V or +12V
- electric output: open collector ( NPN or PNP), push-pull
For more details about encoder installation see also chapter 4.6.
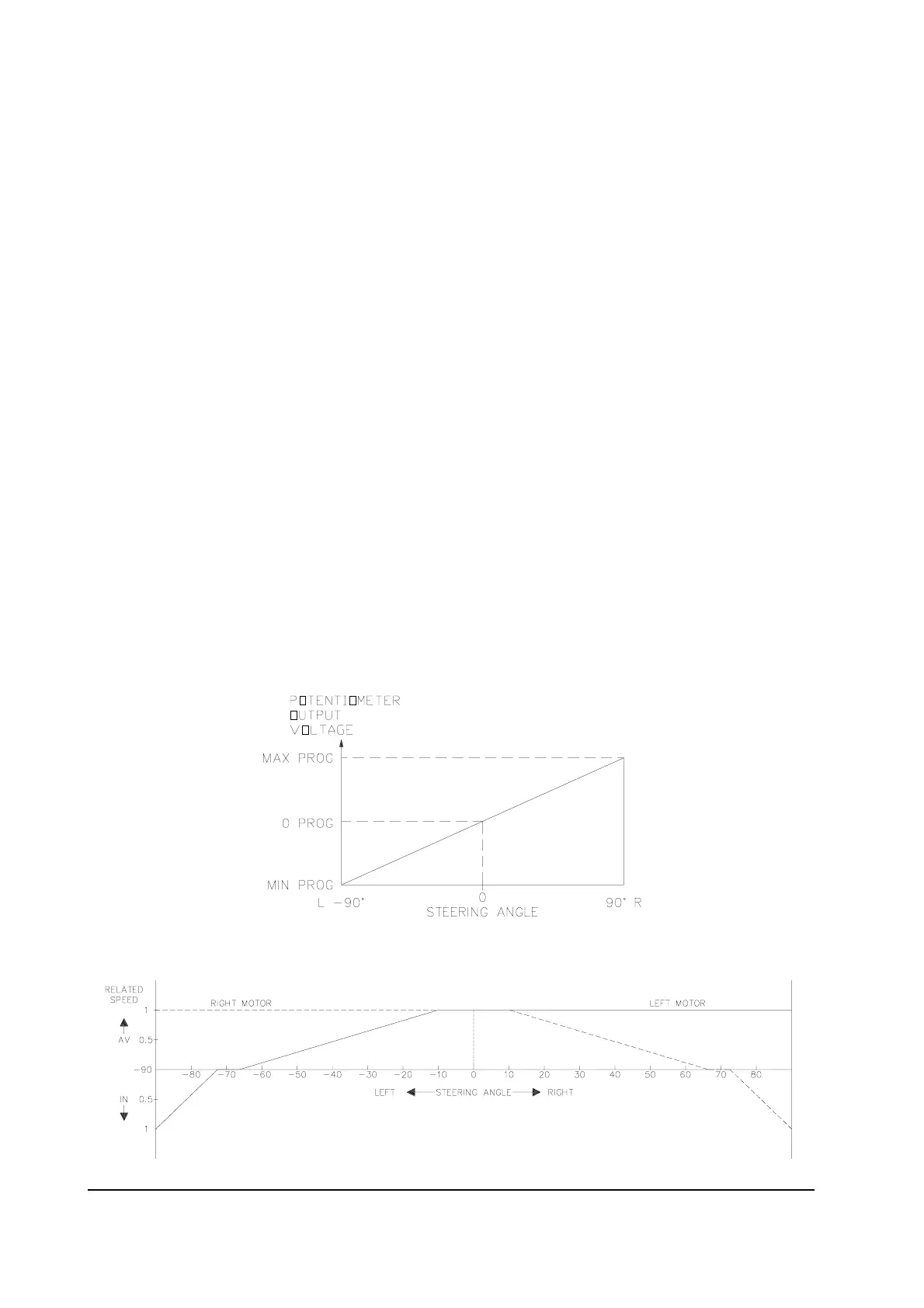
2.5.5 Steering angle transducer
Angular position of steered wheels is transduced to an electric information (voltage) by
means of a potentiometer, with following characteristics:
- resistance in the 2kohm to 20kohm range;
- suggested rotation electric angle: at least 300°;
- positive supply: 5V or 10V;
- potentiometer has to be installed in a way that in the "zero" position (straight wheels),
poti output voltage is in the middle of the electric range corresponding to a full left-to-
right transition of the steered wheels;
- install the potentiometer in a way that, when truck turns right, poti output voltage in-
creases;
- use "SET STEER MIN" and "SET STEER MAX" functions to record the extremes (mini-
mum and maximum) of the potentiometer range; see chapter 5.4.
- use "SET STEER 0-POS" function to record the poti output when the steered wheels
are straight; see chapter 5.4.
MOTOR MANAGEMENT TABLE
 Loading...
Loading...