Page 24
Unity Controller R9 Variants, Issue 13
8. 2 Basic Operation
Operation of the HMI is via the touch-screen display. Depending on which permission level the
operator is logged in to, dierent settings, parameters and information is available.
8. 3 Modes of Operation
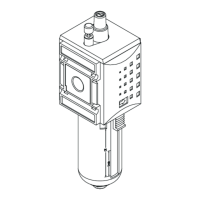
MANUAL MODE
Commands for riveting come from the user.
The pendant tool is required for manual
operation.
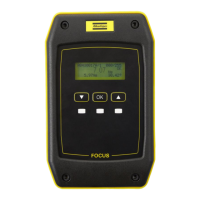
AUTO MODE
Commands for riveting come from the robot.
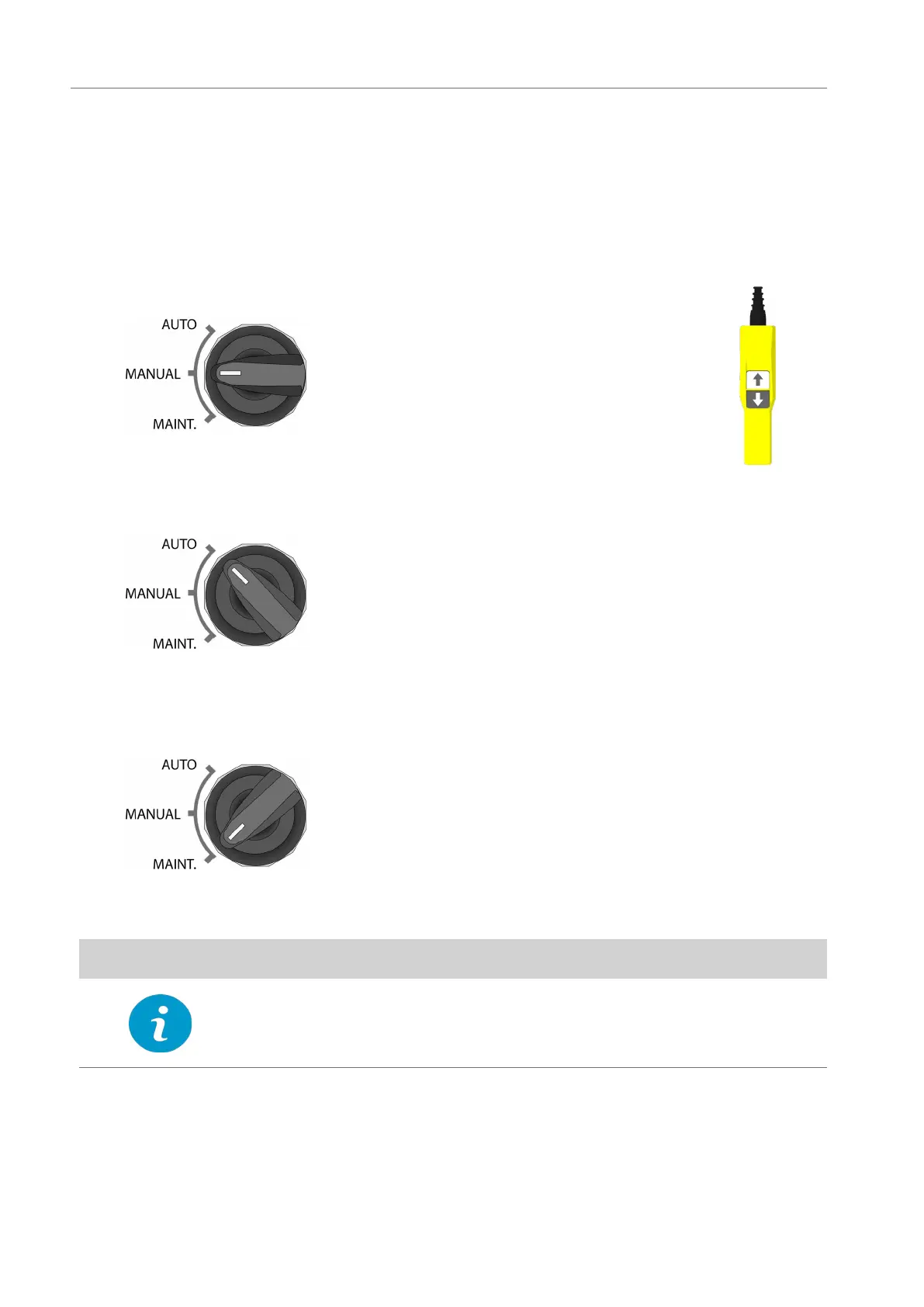
MAINTENANCE
This Mode is used for calibration, homing and maintenance
tasks.
Not used for riveting.
NOTE
For system set-up and operation refer to software manual.
 Loading...
Loading...