Par. 1-00
Par. 1-01 [0] Speed
OL
[1] Speed
CL
[2] Torque [3] Process [4] Torque
OL
[5] Wobble [6] Surface
Wnd
[7] Ext. PID
OL
[8] Ext. PID
CL
[0] U/f
[1] VVC
plus
[2] Flux sensorless
[3] Flux w/ motor feedback
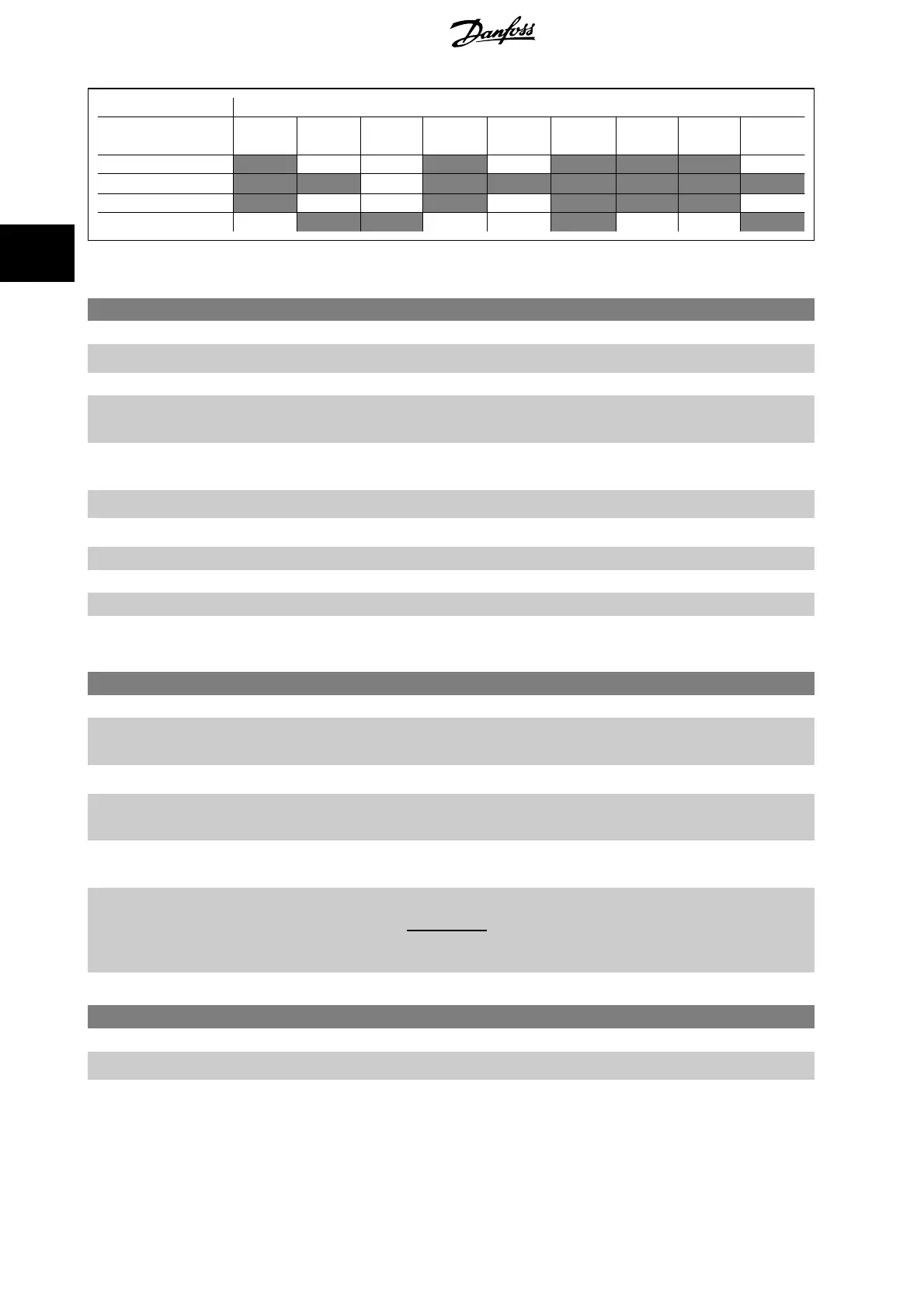
Table 3.3: Overview of possible combinations of the settings in par. 1-00
Configuration Mode
and par. 1-01
Motor Control Principle
. The gray cells mark
the possible combinations.
1-02 Flux Motor Feedback Source
Option: Function:
Select the interface at which to receive feedback from the motor.
[0] Motor feedb. P1-02
[1] * 24V encoder A and B channel encoder, which can be connected to the digital input terminals 32/33 only. Termi-
nals 32/33 must be programmed to
No operation
.
[2] MCB 102 Encoder module option which can be configured in par. group 17-1*
This parameter appears in FC 302 only.
[3] MCB 103 Optional resolver interface module which can be configured in par. group 17-5**
[5] MCO Encoder 2 encoder interface 2 of the optional programmable motion controller MCO 305.
[6] Analog input 53
[7] Analog input 54
[8] Frequency input 29
[9] Frequency input 33
This parameter cannot be adjusted while the motor is running.
1-03 Torque Characteristics
Option: Function:
Select the torque characteristic required.
VT and AEO are both energy saving operations.
[0] * Constant torque Motor shaft output provides constant torque under variable speed control.
[1] Variable torque Motor shaft output provides variable torque under variable speed control. Set the variable torque
level in par. 14-40
VT Level
.
[2] Auto Energy Optim. Automatically optimises energy consumption by minimising magnetisation and frequency via
par. 14-41
AEO Minimum Magnetisation
and par. 14-42
Minimum AEO Frequency
.
[5] Constant Power The function provide a constant power in field weakening area. Follows the formula:
P
constant
=
Torque
x
RPM
9550
This selection maybe unavailable depending on drive configuration.
This parameter cannot be adjusted while the motor is running.
1-04 Overload Mode
Option: Function:
[0] * High torque Allows up to 160% over torque.
[1] Normal torque For oversized motor - allows up to 110% over torque.
This parameter cannot be adjusted while the motor is running.
3 Parameter descriptions FC 300 Programming Guide
46
MG.33.M8.02 - VLT
®
is a registered Danfoss trademark
3
 Loading...
Loading...












