Chapter 12 Description of Parameter SettingsME300
12.1-02-8
Settings Functions Descriptions
retain the output value
before disabled
PID function is enabled, and the terminal contact of this
parameter is ON, then PID does not operate, and its output
value remains the same as the value before it was disabled.
83
Multi-motors (IM)
selection bit 0
ON: parameters can be changed
Example: MI1 = 83
MI1
Motor
Selection
Related Motor Parameter
Max. Operation
Frequency
V/F Curve
Parameter
OFF Motor 1 Pr.01-00
Pr.01-01
–01-08
ON Motor 2 Pr.01-52
Pr.01-35
–01-42
94
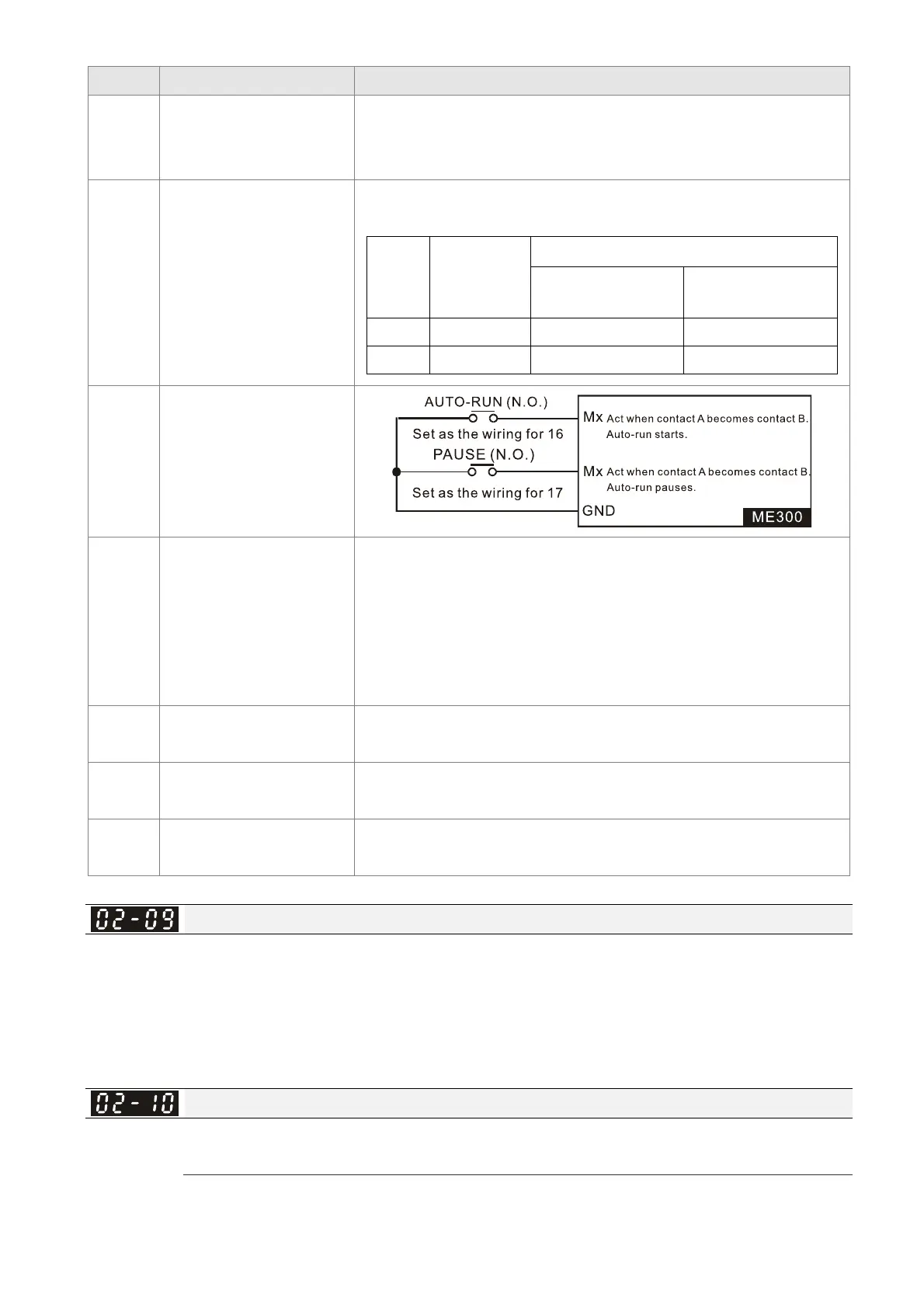
Programmable AUTO
RUN
95
Pausing AUTO RUN
When the functional terminals for programmable auto-run enable,
the output frequency of the AC motor drive operates automatically
according to the settings for multi-step speed.
You can pause the terminals to temporarily stop the running
program during operation. The program resumes running after the
pausing finishes.
97
Multi-pumps switch by
Hand / Auto mode
Use this terminal to switch between Hand / Auto mode.
98
Simple positioning stop
by forward limit
If the motor receives this signal while running forward, it stops
running forward.
99
Simple positioning stop
by reverse limit
If the motor receives this signal while running reverse, it stops
running reverse.
UP / DOWN Key Mode
Default: 0
Settings 0: UP / DOWN by acceleration / deceleration time
1: UP / DOWN constant speed (Pr.02-10)
2: Pulse signal (Pr.02-10)
3: External terminals UP / DOWN key mode
Constant Speed the Acceleration / Deceleration Speed of the UP / DOWN Key
Default: 0.001
Settings 0.001–1.000 Hz / ms
Use when the multi-function input terminals are set to 19, 20 (UP / DOWN command).
The frequency increases or decreases according to Pr.02-09 and Pr.02-10.
 Loading...
Loading...