Chapter 12 Description of Parameter SettingsME300
12.1-08-10
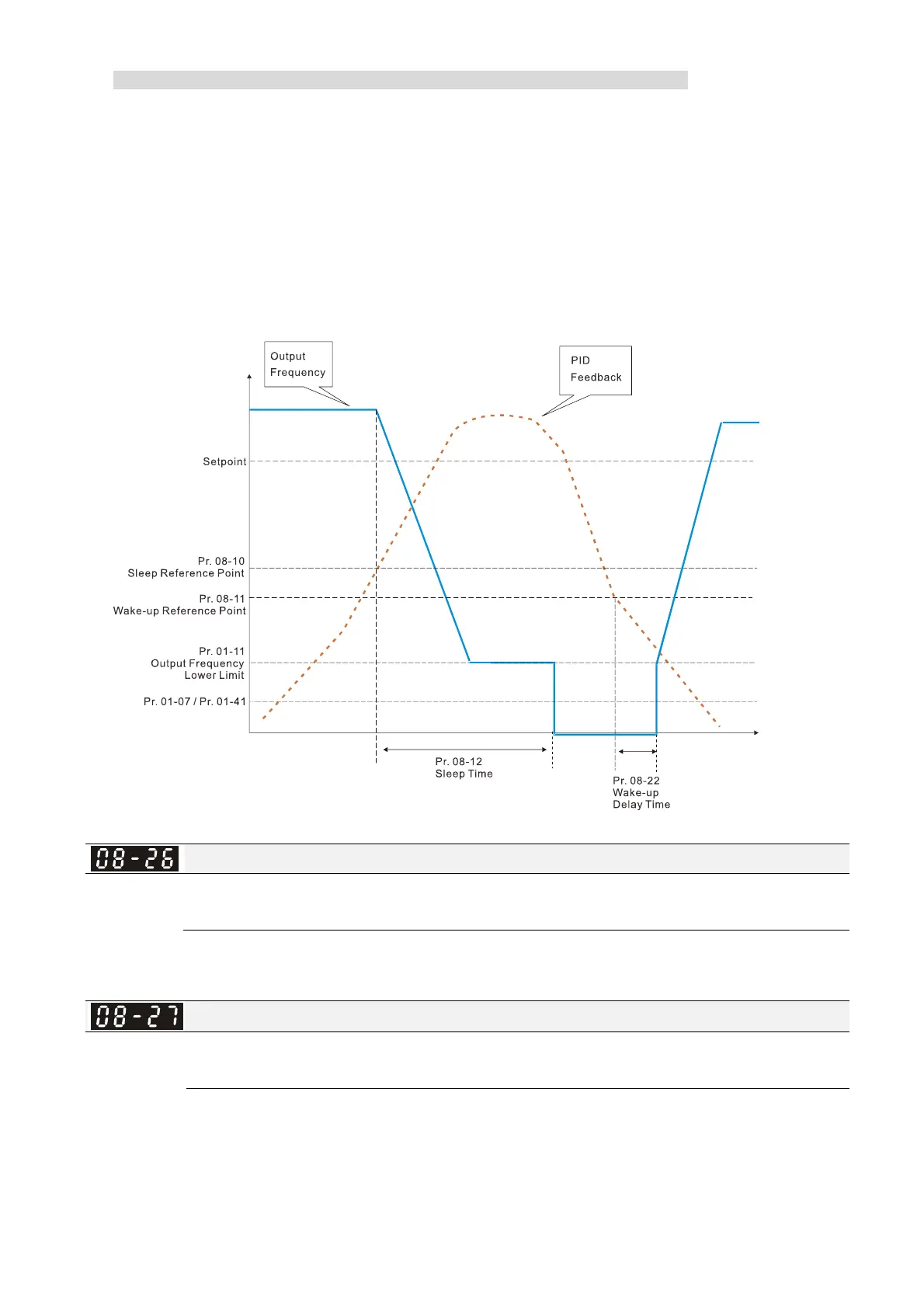
3) PID Feedback Rate Percentage (Use PID, Pr.08-00 ≠ 0 and Pr.08-18 = 1)
When the PID feedback rate reaches the sleep level percentage, the drive starts to count the
sleep time. The output frequency also decreases. If the drive exceeds the preset sleep time, it
goes to sleep mode (0 Hz). If the drive does not reach the sleep time, it remains at the lower limit
(if there is a preset of lower limit.), or it remains at the lowest output frequency set for Pr.01-07 and
waits to reach the sleep time before going into sleep mode (0 Hz).
When the PID feedback value reaches the wake-up percentage, the drive starts to count the
wake-up delay time. Once it reaches the wake-up delay time, the drive starts the acceleration time
to reach the PID Frequency command value.
PID Output Command Limit (Reverse Limit)
Default: 100.0
Settings 0.0–100.0%
When PID enables the reverse direction, the PID output amount is a negative value, and the PID
output value is limited by the setting for Pr.08-26. Use this function with Pr.08-21.
PID Command Acceleration / Deceleration Time
Default: 0.00
Settings 0.00–655.35 sec.
0.00 seconds: Disables the PID acceleration/deceleration command, and the target value is
equal to the PID command.
Not equal to 0.00 seconds: Enables the PID acceleration/deceleration command. For PID
acceleration and deceleration, when the PID target value changes, the command value
increment/decrement is executed according to this parameter.
 Loading...
Loading...
