Setup & Operation 4. Setting of End Effectors
56
G10 / G20 Rev.2
4.4 Precautions for Auto Acceleration/Deceleration of Joint #3
When you move the Manipulator horizontally with Joint #3 (Z) at a high position, the
motion time will be faster. When Joint #3 gets below a certain point, then auto
acceleration/deceleration is used to reduce acceleration/deceleration. (Refer to the figure
below.) The higher the position of the shaft is, the faster the motion
acceleration/deceleration is. However, it takes more time to move Joint #3 up and down.
Adjust the position of Joint #3 for the Manipulator motion after considering the relation
between the current position and the destination position. The upper limit of Joint #3
during horizontal motion can be set by the LimZ command.
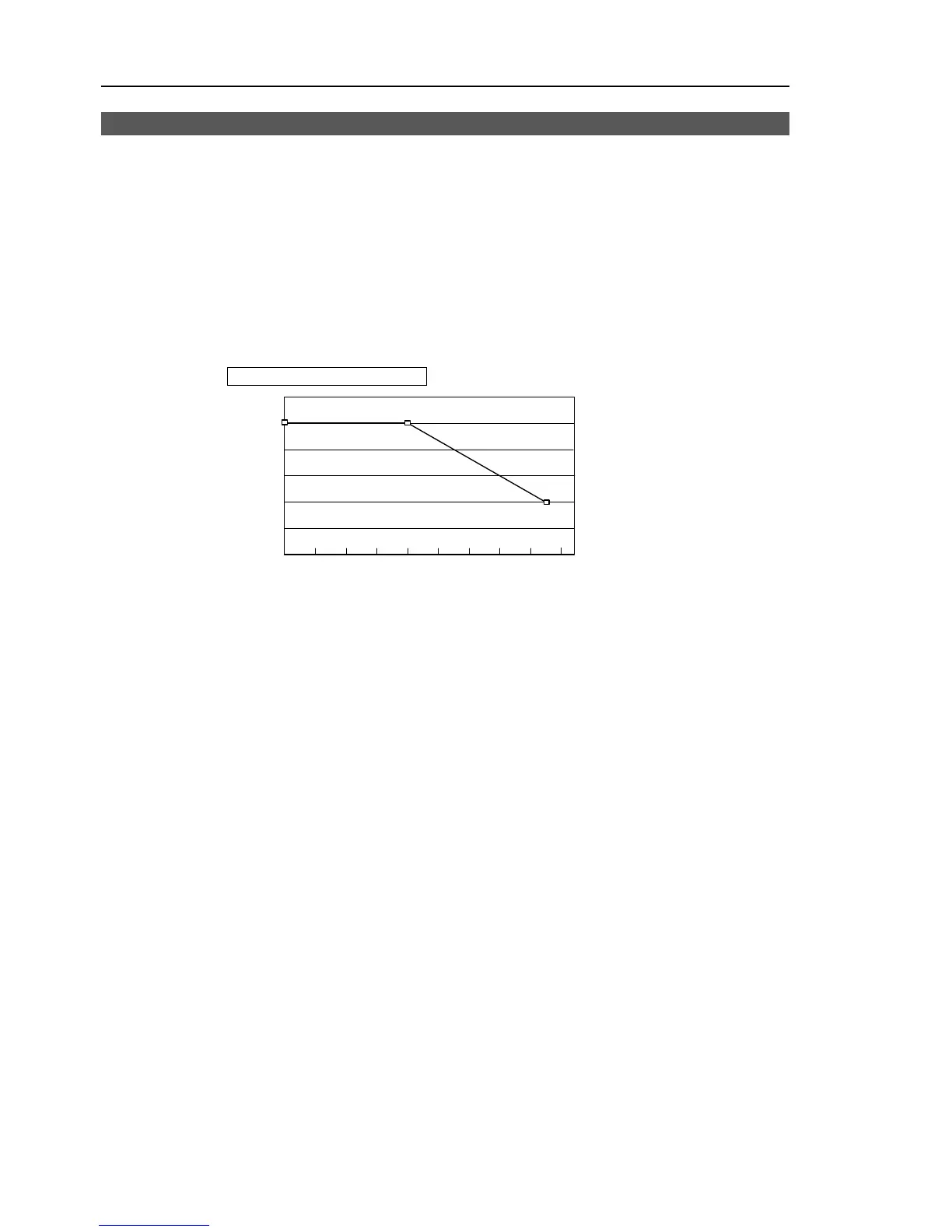
Automatic acceleration/deceleration vs. Joint #3 position
G10 series and G20 series
* The percentage in the graph is
based on the acceleration /
deceleration at the upper-limited
position of Joint #3 as 100%.
120
100
80
60
40
20
0 -100 -200 -300 -400 (mm)
Height of the shaft
(%)
100
40
100
)
NOTE
When moving the Manipulator horizontally while the shaft is being lowered, it may cause
over-shoot at the time of final positioning.
 Loading...
Loading...







