REMOTE POSITIONER
This machine has the functions of the remote bucket positioner and the remote boom positioner.
METHOD FOR OPERATING REMOTE BUCKET POSITIONER
1.
Raise the boom and dump the bucket.
2.
Operate
the bucket control lever to the tilt detent position
and release your hand from the lever.
The bucket
tilts and then its tilting stops at the moment
when the bucket control lever returns from the detent posi-
tion to the HOLD position.
When the boom is lowered near to the ground, the bucket
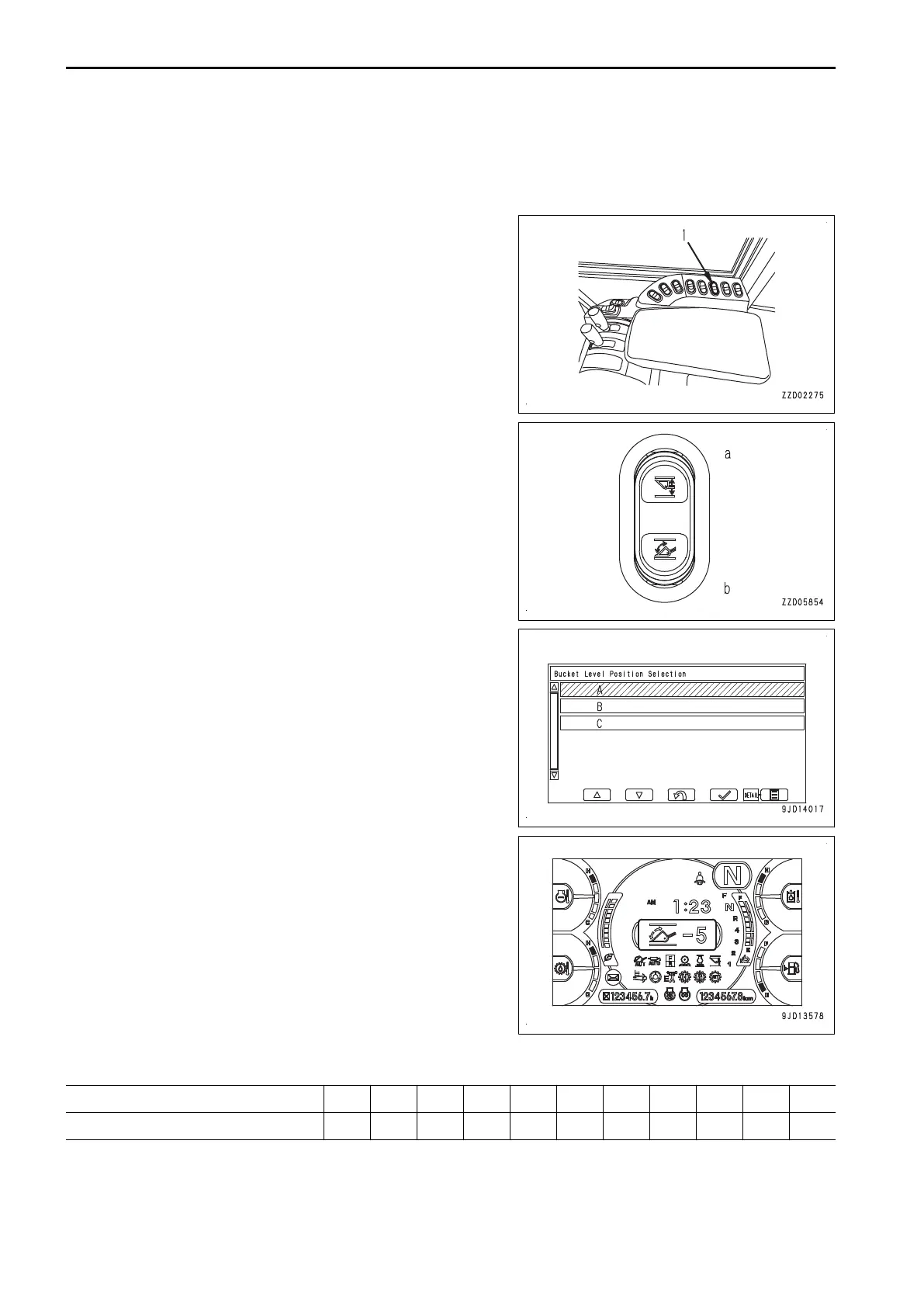
cutting edge is set to the position specified by remote posi-
tioner switch (1).
3.
To change the bucket stop position, stop the bucket at a
desired position and press position (b) of switch (1).
The buzzer “beeps”
and the bucket stop position is set to
that position. And the monitor displays the position setup
level.
When resetting the bucket stop position, hold down posi-
tion (b) of switch (1) for more than 1 second.
The buzzer “beeps” indicating that the bucket stop position
so far set has been reset. The position is then returned to
the level position A, B or C that has been specified from
“Bucket Level Position Selection”.
REMARK
The bucket stop position can be set within the range of ±5
steps of A, B or C that has been set in “Bucket Level Posi-
tion Selection”.
The bucket stop position cannot be set beyond this range.
The table below shows the relationship between the angle setup level and bucket stop angle of the standard
bucket.
Angle setup level -5 -4 -3 -2 -1 0 1 2 3 4 5
Bucket stop angle -5 -4 -3 -2 -1 0 1 2 3 4 5
(The bucket stop angle is a rough indication.)
MACHINE OPERATIONS AND CONTROLS OPERATION
3-214

 Loading...
Loading...







