COMMANDES DE L’AUTOPILOT™
(PILOTE AUTOMATIQUE SEULEMENT SUR MOTEURS ÉQUIPÉS)
L’AutoPilot MINNKOTA utilise une boussole magnétique et un microprocesseur qui permettent de pointer le moteur de pêche
dans la direction voulue. Si le vent ou les courants font dériver le bateau, l’AutoPilot note le changement de cap et remet le bateau
dans la bonne direction. La direction de l’AutoPilot est réglée à chaque changement de direction. Pour changer de direction,
tourner jusqu’à ce que la tête de commande pointe dans la direction désirée. L’AutoPilot tire alors le bateau dans la direction
choisie et fait les corrections nécessaires pour naviguer dans la direction voulue.
1. Cet appareil est muni d’un interrupteur automatique de direction de sécurité. Au cas où un obstacle empêche le moteur de
pêche de tourner ou par vent fort, la direction automatique peut s’interrompre. Toute entrée de pilotage réinitialiser le système
à la normale.
2. Quand le pilote automatique est allumé et que le moteur de pêche à la traîne est sorti de l’eau et en position rangée, le moteur
de direction continuera de fonctionner jusqu’à ce que le moteur soit correctement rangé. Une fois le moteur correctement
rangé, le pilote automatique s’éteindra et le voyant indiquant que le système est prêt s’éteindra.
3. Cet appareil perçoit le cap du bateau au moyen d’une boussole magnétique. La boussole peut être faussée par des aimants ou
par des masses importantes de métaux ferreux à proximité moins de 12 in. du moteur.
4. Lors d’un changement de cap, la direction se verrouille après un court délai destiné à laisser la boussole se stabiliser.
5. Des obstructions sur l’hélice peut entraîner des vibrations excessives au niveau du moteur. Ces vibrations peuvent entraîner
des errements dans la direction. Éliminer les obstructions pour permettre au moteur de fonctionner normalement.
6. En cas de changements de vitesse importants, l’orientation du moteur peut varier légèrement. Cette situation est normale.
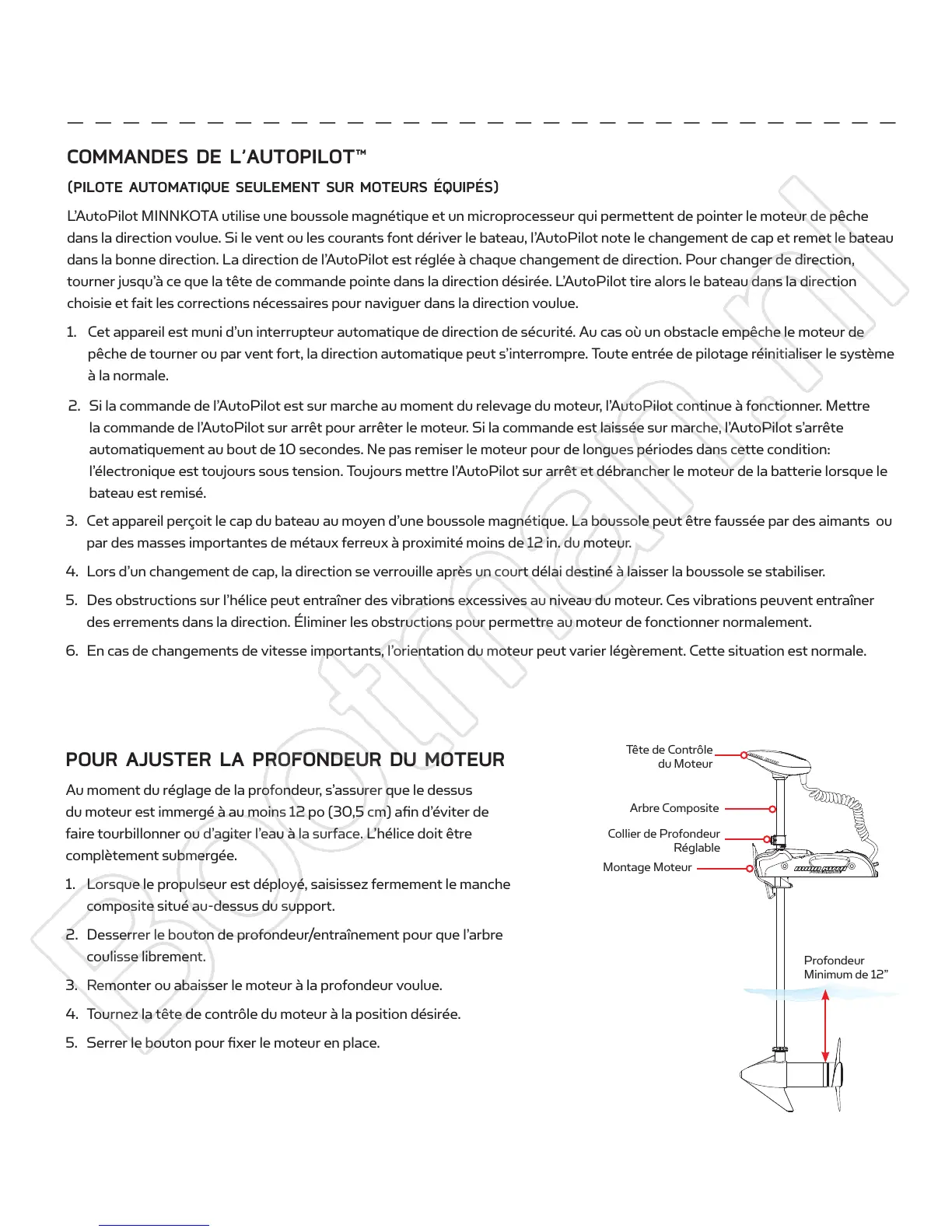
POUR AJUSTER LA PROFONDEUR DU MOTEUR
Au moment du réglage de la profondeur, s’assurer que le dessus
du moteur est immergé à au moins 12 po (30,5 cm) afi n d’éviter de
faire tourbillonner ou d’agiter l’eau à la surface. L’hélice doit être
complètement submergée.
1. Lorsque le propulseur est déployé, saisissez fermement le manche
composite situé au-dessus du support.
2. Desserrer le bouton de profondeur/entraînement pour que l’arbre
coulisse librement.
3. Remonter ou abaisser le moteur à la profondeur voulue.
4. Tournez la tête de contrôle du moteur à la position désirée.
5. Serrer le bouton pour fi xer le moteur en place.
Profondeur
minimum de 12’
Collier de profondeur
réglable
Arbre composite
Montage Moteur
2. Si la commande de l’AutoPilot est sur marche au moment du relevage du moteur, l’AutoPilot continue à fonctionner. Mettre
la commande de l’AutoPilot sur arrêt pour arrêter le moteur. Si la commande est laissée sur marche, l’AutoPilot s’arrête
automatiquement au bout de 10 secondes. Ne pas remiser le moteur pour de longues périodes dans cette condition:
l’électronique est toujours sous tension. Toujours mettre l’AutoPilot sur arrêt et débrancher le moteur de la batterie lorsque le
bateau est remisé.
COMMANDES DE L’AUTOPILOT™
(PILOTE AUTOMATIQUE SEULEMENT SUR MOTEURS ÉQUIPÉS)
L’AutoPilot MINNKOTA utilise une boussole magnétique et un microprocesseur qui permettent de pointer le moteur de pêche
dans la direction voulue. Si le vent ou les courants font dériver le bateau, l’AutoPilot note le changement de cap et remet le bateau
dans la bonne direction. La direction de l’AutoPilot est réglée à chaque changement de direction. Pour changer de direction,
tourner jusqu’à ce que la tête de commande pointe dans la direction désirée. L’AutoPilot tire alors le bateau dans la direction
choisie et fait les corrections nécessaires pour naviguer dans la direction voulue.
1. Cet appareil est muni d’un interrupteur automatique de direction de sécurité. Au cas où un obstacle empêche le moteur de
pêche de tourner ou par vent fort, la direction automatique peut s’interrompre. Toute entrée de pilotage réinitialiser le système
à la normale.
2. Quand le pilote automatique est allumé et que le moteur de pêche à la traîne est sorti de l’eau et en position rangée, le moteur
de direction continuera de fonctionner jusqu’à ce que le moteur soit correctement rangé. Une fois le moteur correctement
rangé, le pilote automatique s’éteindra et le voyant indiquant que le système est prêt s’éteindra.
3. Cet appareil perçoit le cap du bateau au moyen d’une boussole magnétique. La boussole peut être faussée par des aimants ou
par des masses importantes de métaux ferreux à proximité moins de 12 in. du moteur.
4. Lors d’un changement de cap, la direction se verrouille après un court délai destiné à laisser la boussole se stabiliser.
5. Des obstructions sur l’hélice peut entraîner des vibrations excessives au niveau du moteur. Ces vibrations peuvent entraîner
des errements dans la direction. Éliminer les obstructions pour permettre au moteur de fonctionner normalement.
6. En cas de changements de vitesse importants, l’orientation du moteur peut varier légèrement. Cette situation est normale.
Arbre Composite
Profondeur
Minimum de 12”
Montage Moteur
Collier de Profondeur
Réglable
Tête de Contrôle
du Moteur
minnkotamotors.com | 31
©2015 Johnson Outdoors Marine Electronics, Inc.
UTILISATION ET RÉGLAGE DU MOTEUR

 Loading...
Loading...







