2-25
2 Robot arm
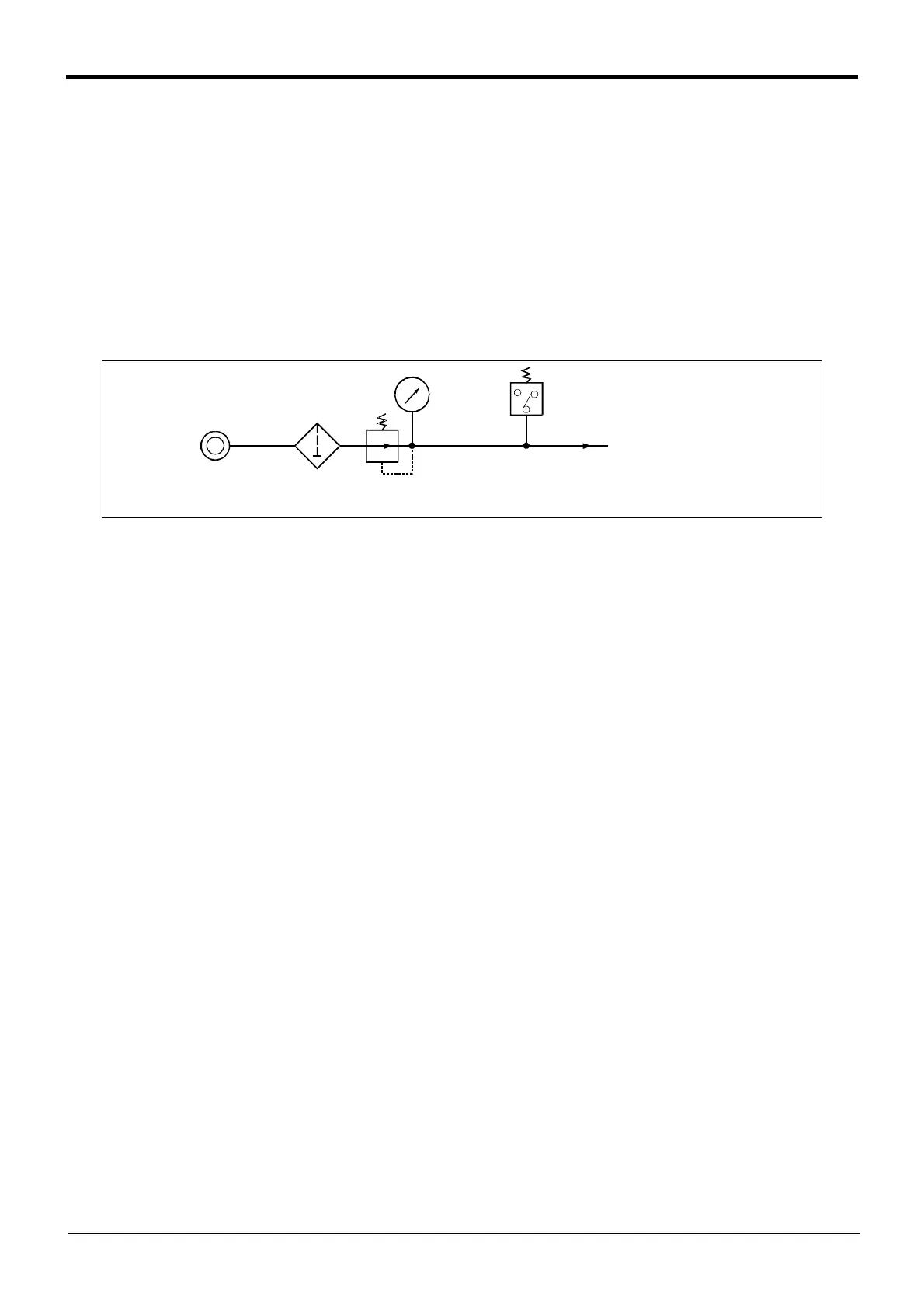
2.5.8 Air supply circuit example for the hand
Fig. 2-10 shows an example of pneumatic supply circuitry for the hand.
(1) Place diodes parallel to the solenoid coil.
(2) When the factory pneumatic pressure drops, as a result of the hand clamp strength weakening, there can be
damage to the work. To prevent it, install a pressure switch to the source of the air as shown in Fig. 2-10 and
use the circuit described so that the robot stops when pressure drops. Use a hand with a spring-pressure
clamp, or a mechanical lock-type hand, that can be used in cases where the pressure switch becomes dam
-
aged.
(3) The optional hand and solenoid valve are of an oilless type. If they are used, don't use any lubricator.
(4) Supply clean air to the vacuum generation valve when you use clean type robot.
(5) If the air supply temperature (primary piping) used for the tool etc. is lower than ambient air temperature, the
dew condensation may occur on the coupling or the hose surface.
Fig.2-10 : Air supply circuit example for the hand
Pressure switch
To the AIR IN (Robot arm)
(MAX0.54MPa)
Pneumatic source
0.7MPa less
Filter
Regurater
(Clean)
 Loading...
Loading...


