4
Overview
4. Overview
This document describes the procedures for connecting E2E-series IO-Link Proximity Sensor
(hereinafter referred to as Proximity Sensor) that is connected via IO-Link to IO-Link Master
Unit (NX-ILM[][][]) to NJ-series Machine Automation Controller (hereinafter referred to as
Controller) via EtherCAT through EtherCAT Coupler Unit (NX-ECC20[]) to which IO-Link
Master Unit is connected and also for checking their connection status - all of which are
produced by OMRON Corporation.
Refer to Section 6. Communications Settings and Section 7. IO-Link Connection Procedure to
understand setting methods and key points to perform cyclic communications in the IO-Link
system.
In this document, a generic EtherCAT slave for EtherCAT communications is called "slave
unit", and a specific EtherCAT slave configured of EtherCAT Coupler Unit and IO-Link Master
Unit is called "Slave Terminal".
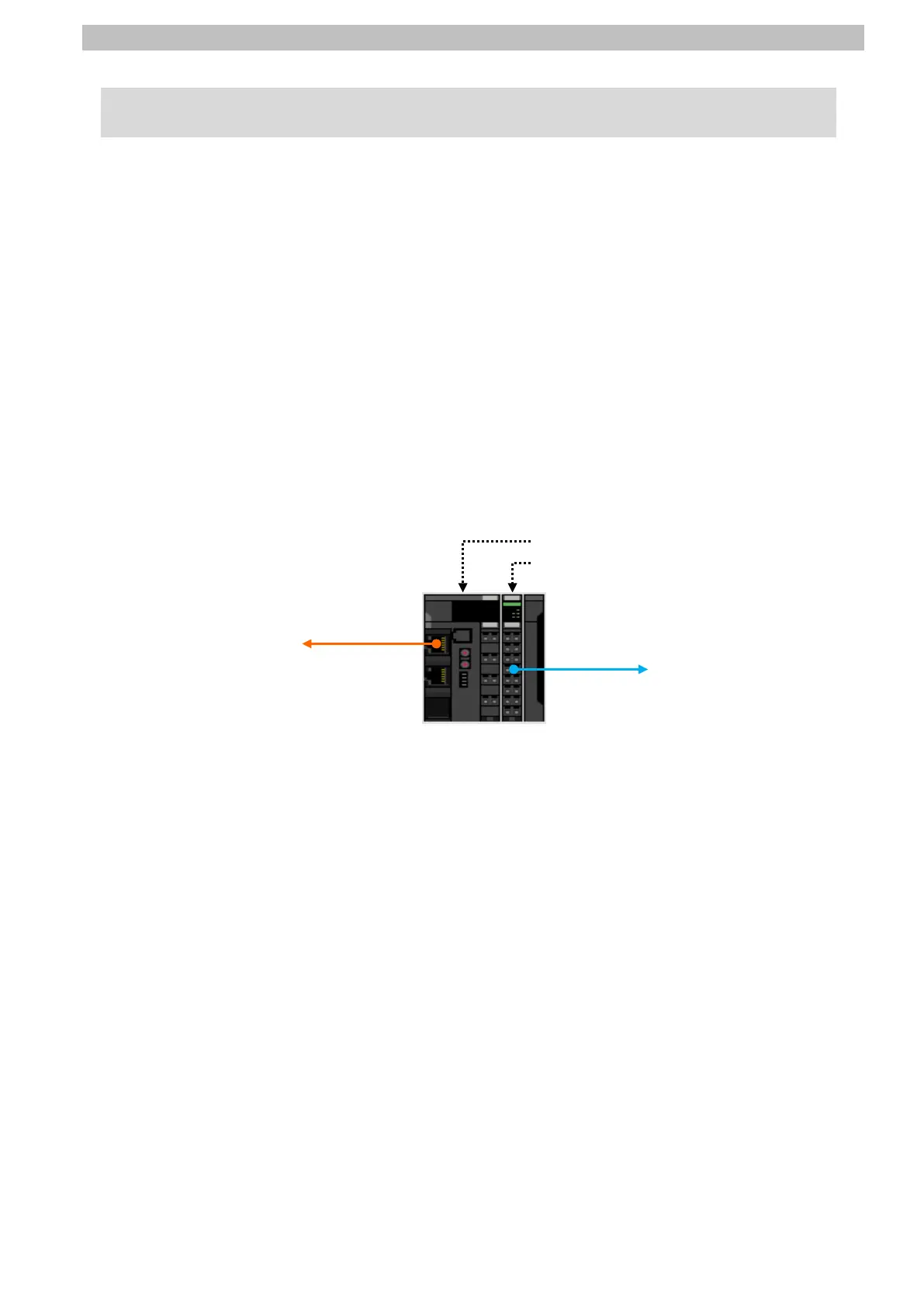
<Slave Terminal Configuration>
EtherCAT Coupler Unit (NX-
IO-Link Master Unit (NX-ILM[][][])
EtherCAT communications with
Controller
-Link communications with

 Loading...
Loading...




