36
6.4. Register the Current Robot Position in the Vision Sensor
To register the current robot position to the Vision Sensor, use "fhsample_regpos".
1
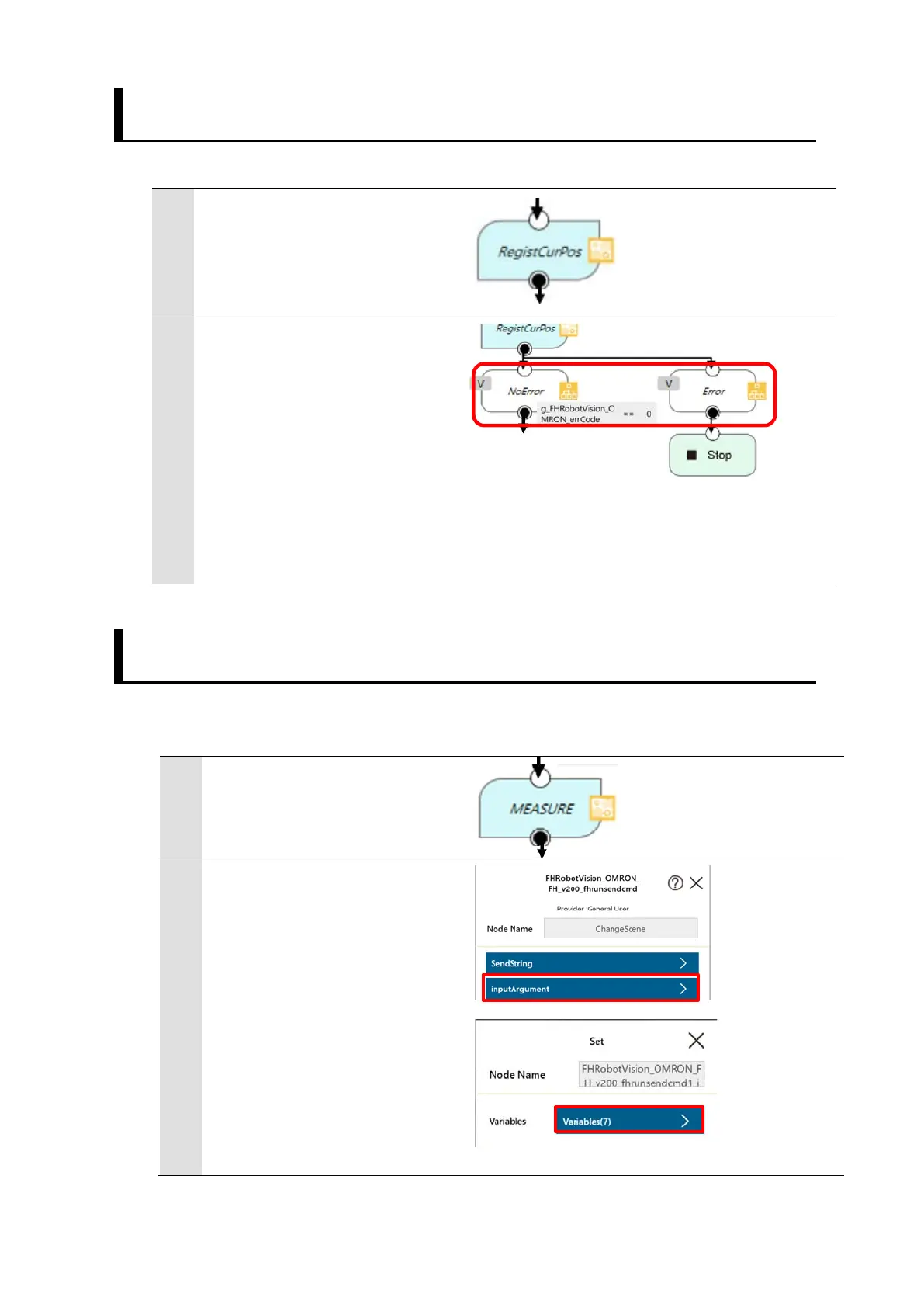
The [RegistCurPos] node
registers the current robot
position to the Vision Sensor.
2
Check for the error in the
[RegistCurPos] node.
The error is stored in the
global variable
[g_FHRobotVision_OMRON_err
Code].
If the error code is 0 (zero),
proceed to the next node.
6.5. Executing Measurements on Vision Sensor
Send the measurement command to the Vision Sensor and receives a response to
that command.
1
Click the [MEASURE] node to
open the configuration dialog
box.
2
Click the [inputArgument] to
open the configuration dialog
box.
Click [Variables(7)] to open
the Variables configuration
dialog box.
fhsample_regpos Component

 Loading...
Loading...














