38
6
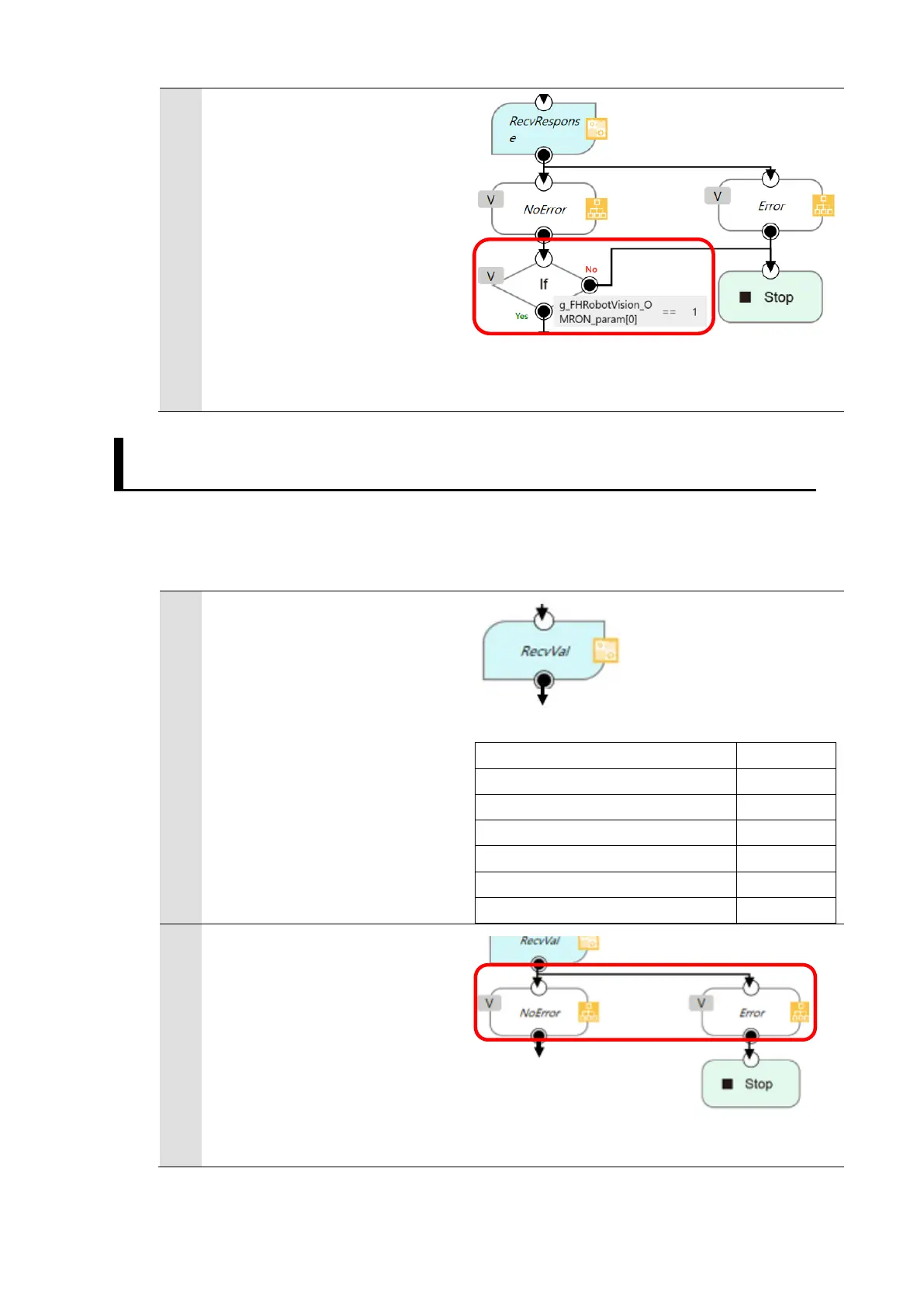
Check the execution result
(command response) of the
[RecvResponse] node.
The result of the execution is
stored in the global variable
[g_FHRobotVision_OMRON_pa
ram[0]].
If the result of the execution is
1 (OK), then proceed to the
6.6. Getting the Measurement Results
The Vision Sensor measurements are received using "fhrunrecvval". In this sample
program, it is assumed that the Vision Sensor measurements are sent in the order
"TJG X Y Z W P R".
1
The [RecvVal] node receives
the measurement result of the
Vision Sensor and stores it in
the
g_FHRobotVision_OMRON_par
am[0-6].
Each element contains the
measurement results as shown
in the table on the right.
g_FHRobotVision_OMRON_param[0]
TJG
g_FHRobotVision_OMRON_param[1]
X
g_FHRobotVision_OMRON_param[2]
Y
g_FHRobotVision_OMRON_param[3]
Z
g_FHRobotVision_OMRON_param[4]
W
g_FHRobotVision_OMRON_param[5]
P
g_FHRobotVision_OMRON_param[6]
R
2
Check for the error in the
[RecvResponse] node.
The error is stored in the
global variable
[g_FHRobotVision_OMRON_err
Code].
If the error code is 0 (zero),