41
7. Component Reference
This chapter describes the functions for building a robot vision application
7.1. List of Components
This is a list of functions that can be used by the actual driving robot program.
Initialize a global variable.
fhsampleregpos
Register the current robot coordinates to the
Vision Sensor
Chapter 7.3.2
fhrunsendcmd Send a no-procedure command to the Vision
Chapter 7.3.3
fhrunrecvres Receive a command response from the Vision
Chapter 7.3.4
Receive numerical data from the Vision Sensor
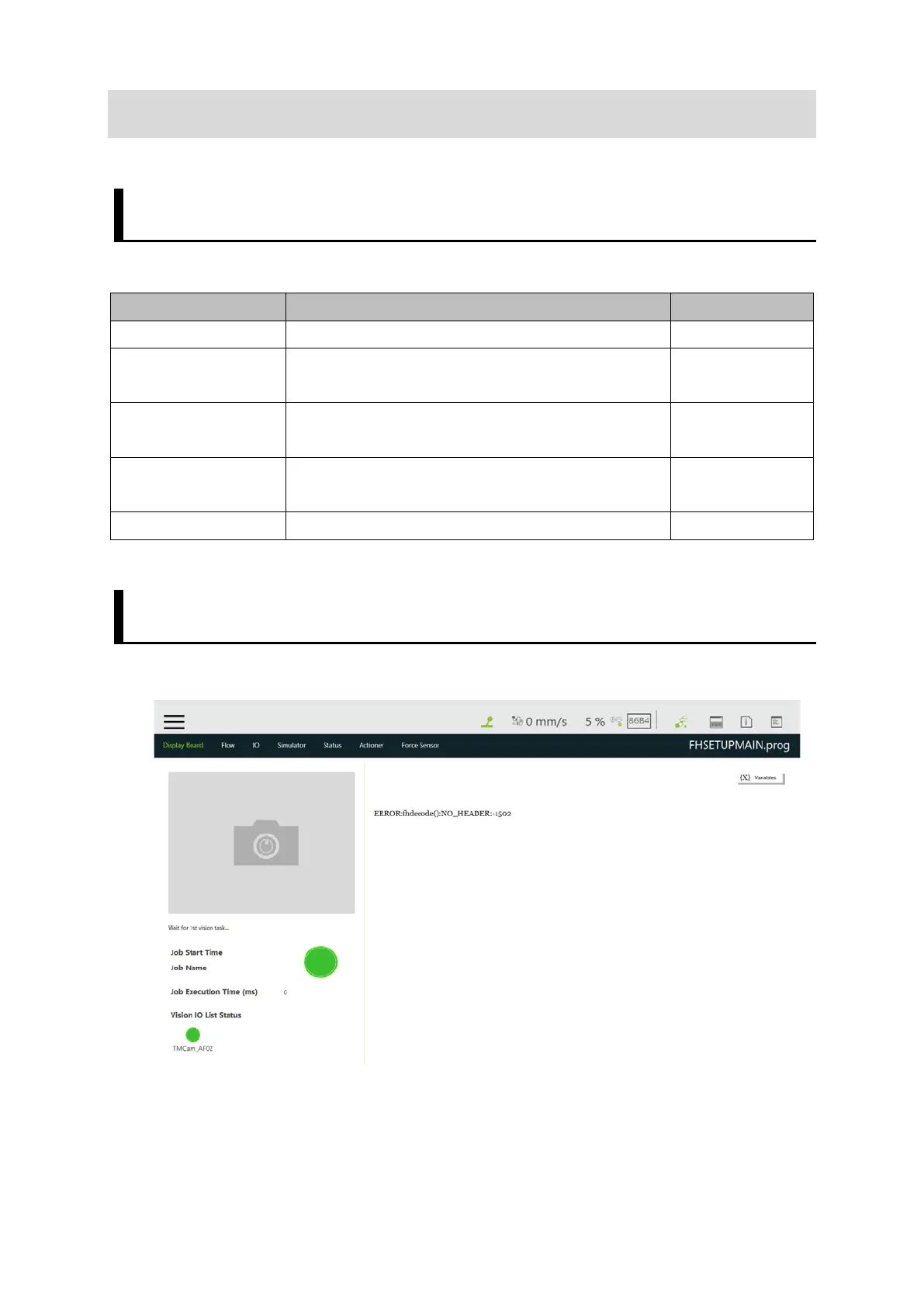
7.2. Error Message
The error message will be displayed on the DisplayBoard of TMflow.

 Loading...
Loading...














