40
The approach position is the
point of access to the Robot
Command position.
The approach distance is the
offset value in the Z
direction(mm) in the robot
3
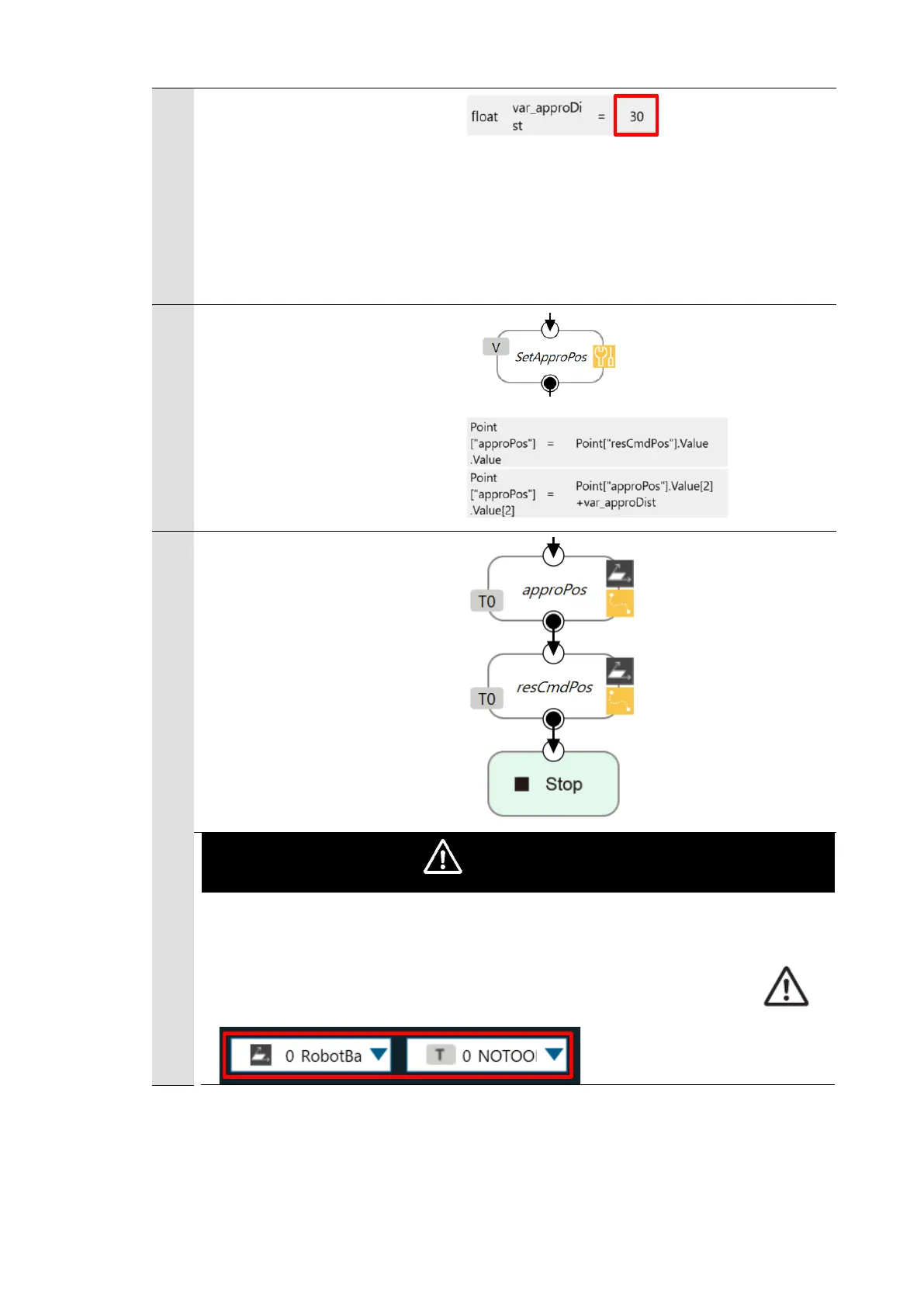
The [SetApproPos] node
calculates the approach
position by adding the
approach distance in the Z+
direction from the robot
command position.
4
The [aproPos] node moves the
robot to the approach position.
Then, move to the robot
command position
[resCmdPos]. At this position,
the workpiece can be grasped.
The sample program ends
after moving to the robot
command position.
WARNING
These operations drive the robot.
Operate the robot in the state whereby pressing the
[Emergency stop] button can stop its motion anytime.
In the base list, select [RobotBase] as the current base.
In the tool list, select [NOTOOL] as the current tool.
 Loading...
Loading...















