29
Apply Drive/Motor data to axis via network reading
3.
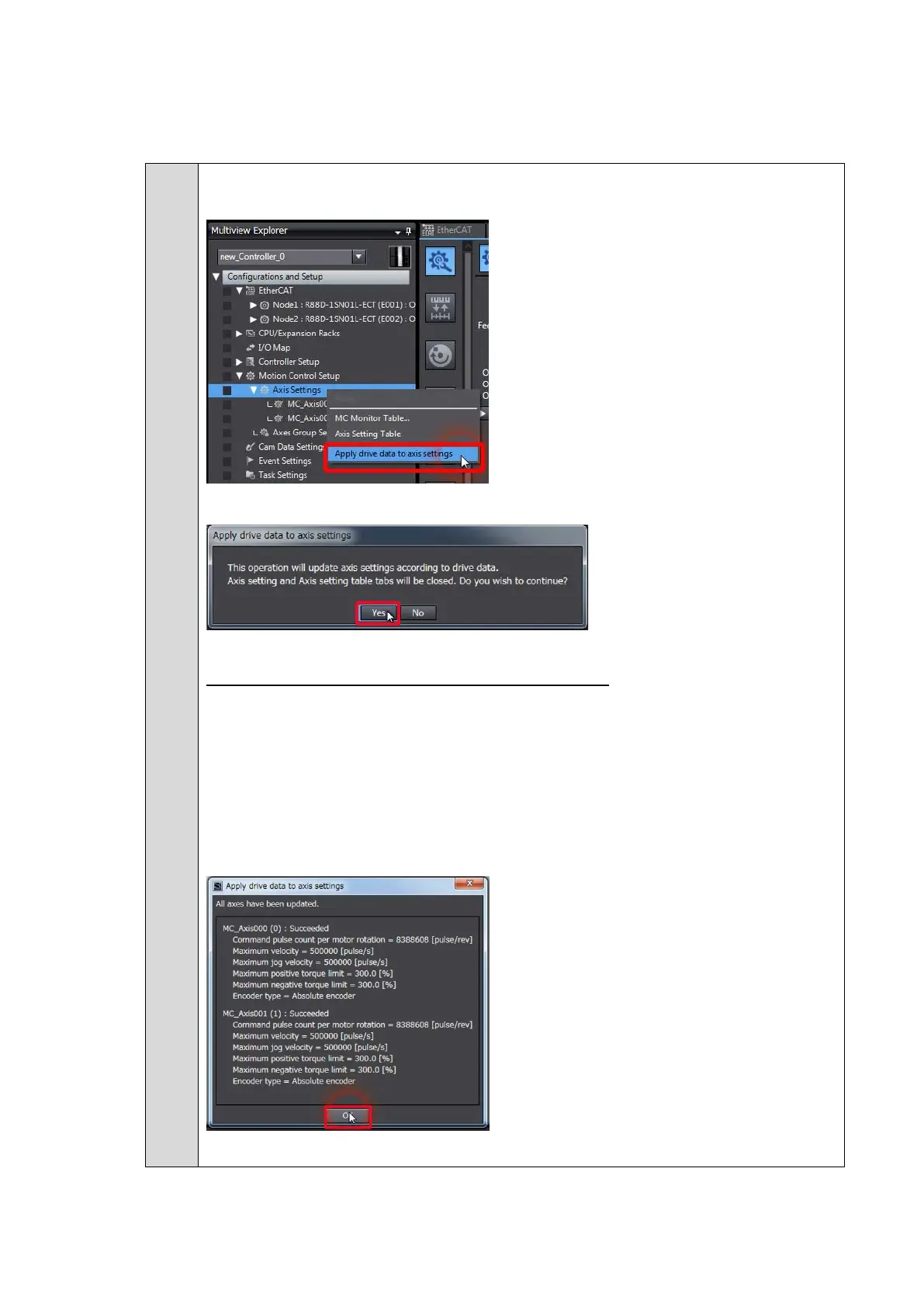
Right-click Axis Settings in the Multiview Explorer and select Apply drive data to axis
settings.
Click the Yes Button to acquire data from the servo drive via EtherCAT Network
Applied axis settings are based on drive and motor data:
Command pulse count per motor rotation is set to 8,388,608 following the 23 bits
resolution of the motor.
Maximum velocity and Maximum jog velocity are set based on rated speed of the
motor.
Maximum positive torque limit and Maximum negative torque limit are set based
on drive/motor maximum torque limit.
Encoder type is set to Absolute encoder.
After confirmation, Click the Ok Button.

 Loading...
Loading...

