5 - 5
5 EtherCAT Communications
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
5-3 EtherCAT State Machine
5
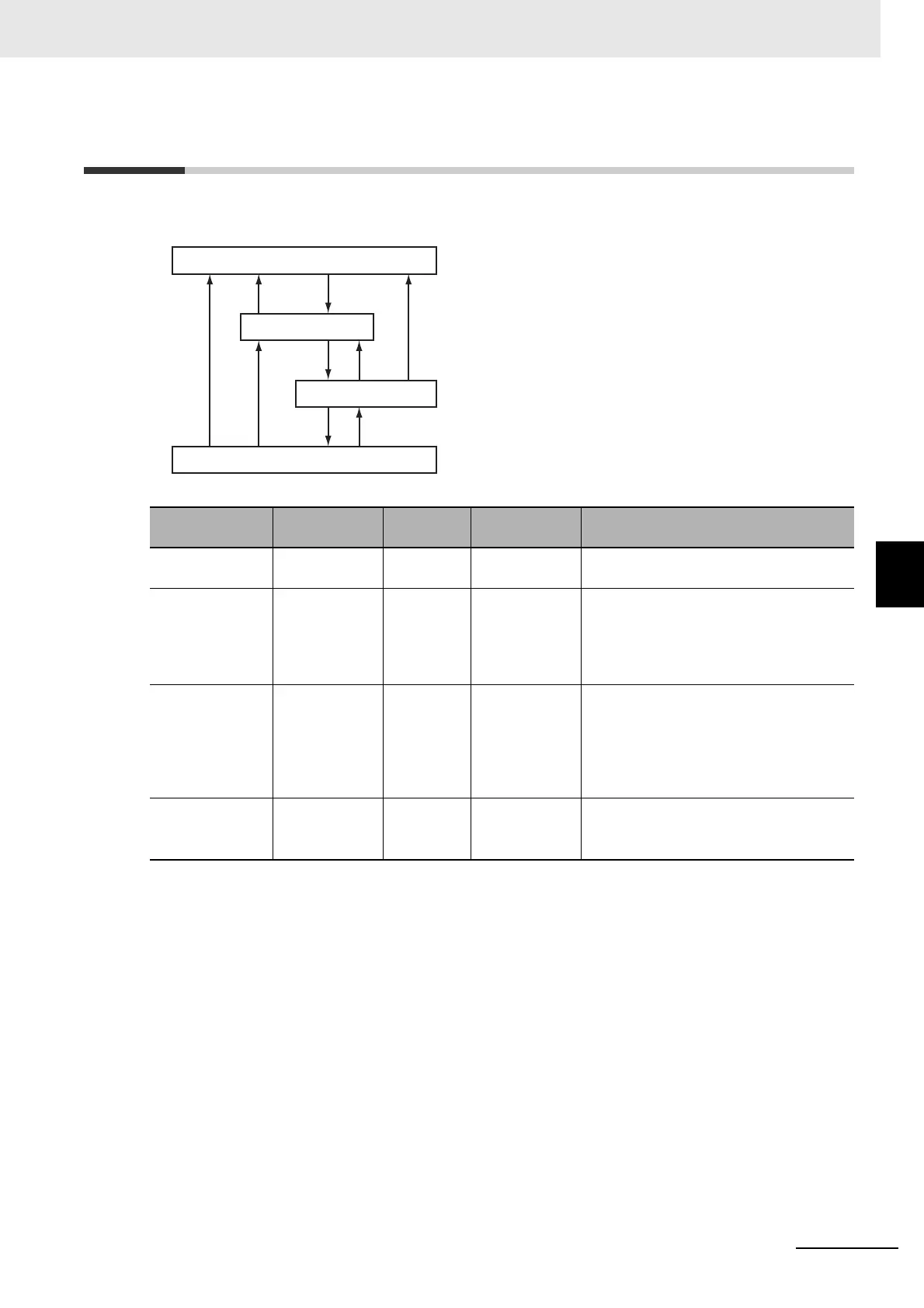
5-3 EtherCAT State Machine
The EtherCAT State Machine (ESM) of the EtherCAT slave is controlled by the EtherCAT Master.
Status
SDO
communications
PDO
reception
PDO
transmission
Description
Init Not possible Not
possible
Not possible Communications are being initialized.
Communications are not possible.
Pre-Operational
(Pre-Op)
Possible Not
possible
Not possible Only mailbox communications are
possible in this state.
This state is entered after initialization has
been completed. It is used to initialize
network settings.
Safe-Operational
(Safe-Op)
Possible Not
possible
Possible In this state, PDO transmissions are
possible in addition to mailbox
communications.
DC mode cyclic communications can be
used to send information such as status
from the Servo Drive.
Operational (Op) Possible Possible Possible This is a normal operating state.
DC mode cyclic communications can be
used to control the motor.
Init
Operational
Safe-Operational
Pre-Operational
 Loading...
Loading...