6-6
6-3 Cyclic Synchronous Position Mode
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
6
Drive Profile
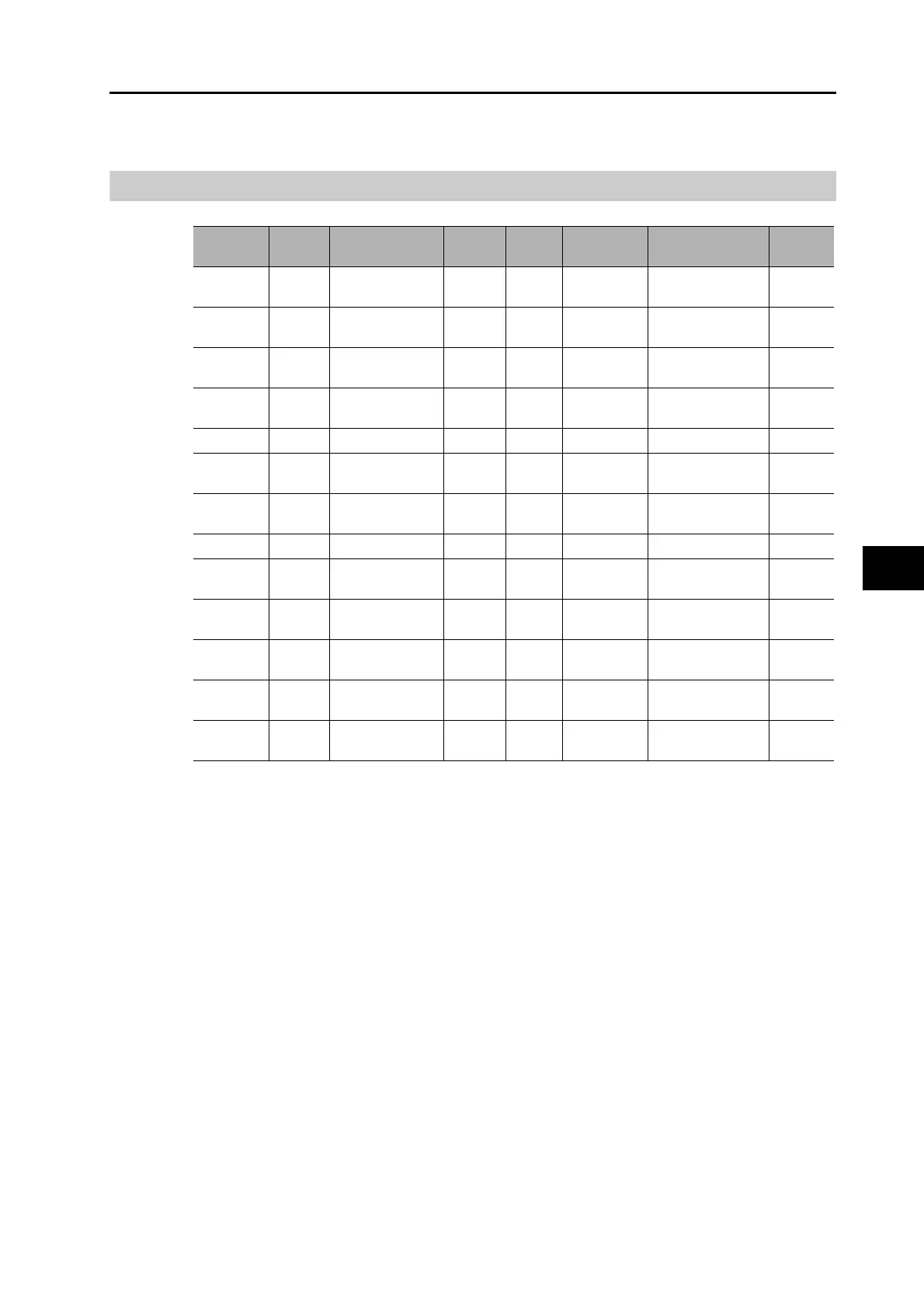
Related Objects
*1 The Following error window object can be set to between 0 and 134,217,728, or 4,294,967,295. If the
object is set to 4,294,967,295, the detection of Following error will be disabled. If it is set to 0, a
Following error will always occur. If the set value is between 134,217,729 and 4,294,967,294, it is set
to 134,217,728. In this case, 134,217,728 will be returned when the object is read.
Index
Sub-
index
Name Access Size Unit Setting range
Default
setting
6040 hex 0
Controlword
RW U16
0 to FFFF
hex
0 to FFFF hex 0000h
6060 hex 0
Modes of
operation
RW INT8 − 0 to 10 0
607A hex 0
Target position
RW INT32
Command
units
−2,147,483,648 to
2,147,483,647
0000h
6065 hex
*1
0
Following error
window
RW U32
Command
units
0 to 134,217,728, or
4,294,967,295
100000
6072 hex 0 Max torque RW U16 0.1% 0 to 5,000 5000
60B0 hex 0
Position offset
RW INT32
Command
units
−2,147,483,648 to
2,147,483,647
0000h
60B1 hex 0
Velocity offset
RW INT32
Command
units/s
−2,147,483,648 to
2,147,483,647
0000h
60B2 hex 0 Torque offset RW INT16 0.1% −5,000 to 5,000 0
6041 hex 0
Statusword
RO U16
0 to FFFF
hex
0 to FFFF hex 0000h
6064 hex 0
Position actual
value
RO INT32
Command
units
−2,147,483,648 to
2,147,483,647
0000h
606C hex 0
Velocity actual
value
RO INT32
Command
units/s
−2,147,483,648 to
2,147,483,647
0000h
6077 hex 0
Torque actual
value
RO INT16 0.1% −5,000 to 5,000 0000h
60F4 hex 0
Following error
actual value
RO INT32
Command
units
−2,147,483,648 to
2,147,483,647
0000h
 Loading...
Loading...