7-19
7-6 Electronic Gear Function
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
7
Applied Functions
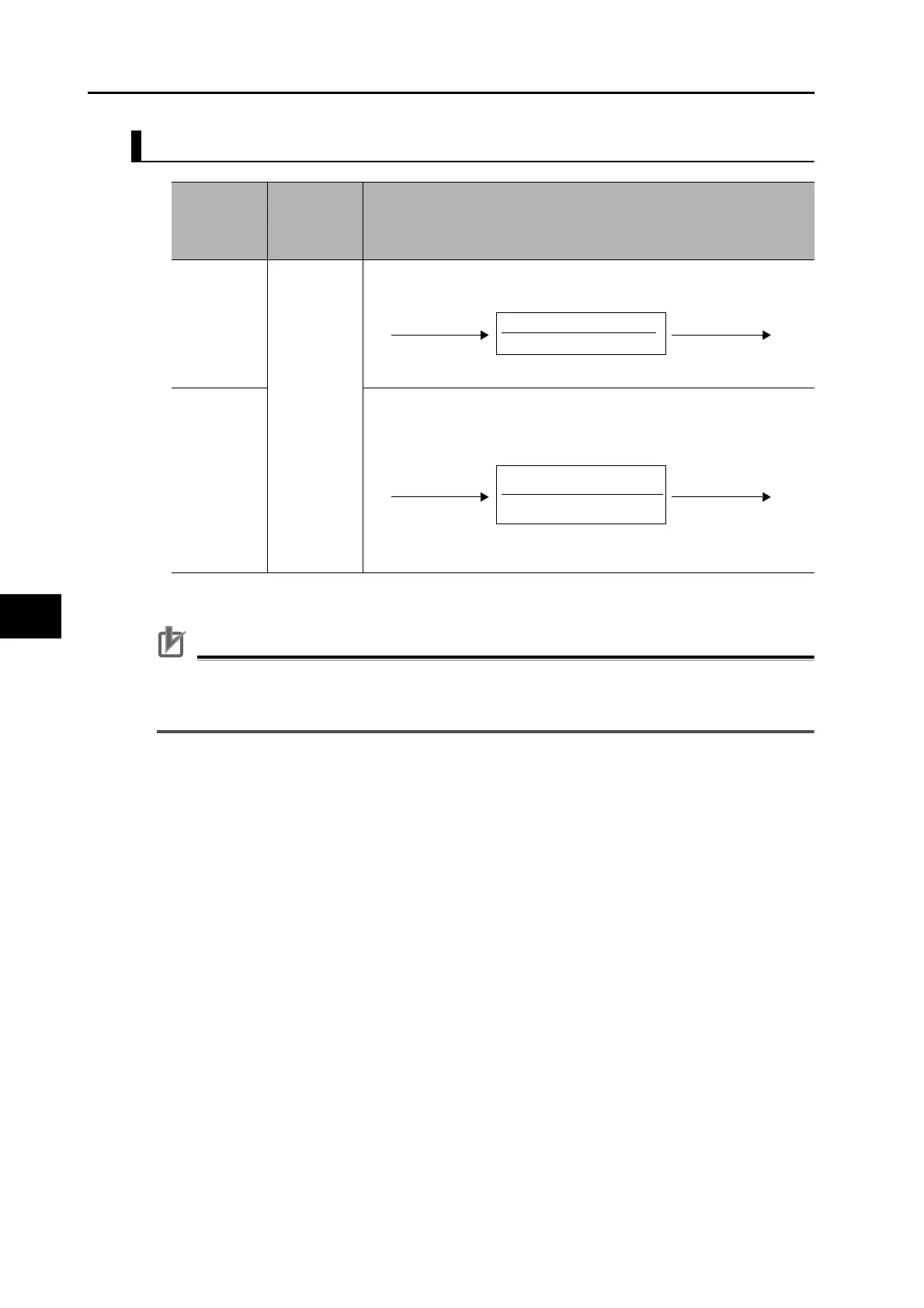
Gear ratio Setting (6091-01 and 6091-02 Hex)
*1 The encoder resolution is set as the numerator for fully-closed control.
Precautions for Correct Use
To make the position command smoother after the electronic gear setting, adjust it by using the
Position Command Filter Time Constant (3222 hex) or by the Position Command FIR Filter Time
Constant (3818 hex).
Motor
revolutions
(6091-01
hex)
Shaft
revolutions
(6091-02
hex)
Description
0
1 to
1073741824
When the Motor revolutions (6091-01 hex) is 0, the processing changes
with the set value of Shaft revolutions (6091-02 hex).
Position command = Encoder resolution/Shaft revolutions (6091-02 hex)
1 to
1073741824
When the Motor revolutions (6091-01 hex) is not 0, the processing
changes with the set values of Motor revolutions (6091-01 hex) and
Shaft revolutions (6091-02 hex).
Position command = Motor revolutions (6091-01 hex) / Shaft revolutions
(6091-02 hex)
Position command
Encoder resolution*1
Shaft revolutions (6091-02 hex)
Position command
Position command
Motor revolutions
(6091-01 hex)
Shaft revolutions (6091-02 hex)
Position command
 Loading...
Loading...