11-9
11-3 Realtime Autotuning
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
11
Adjustment Functions
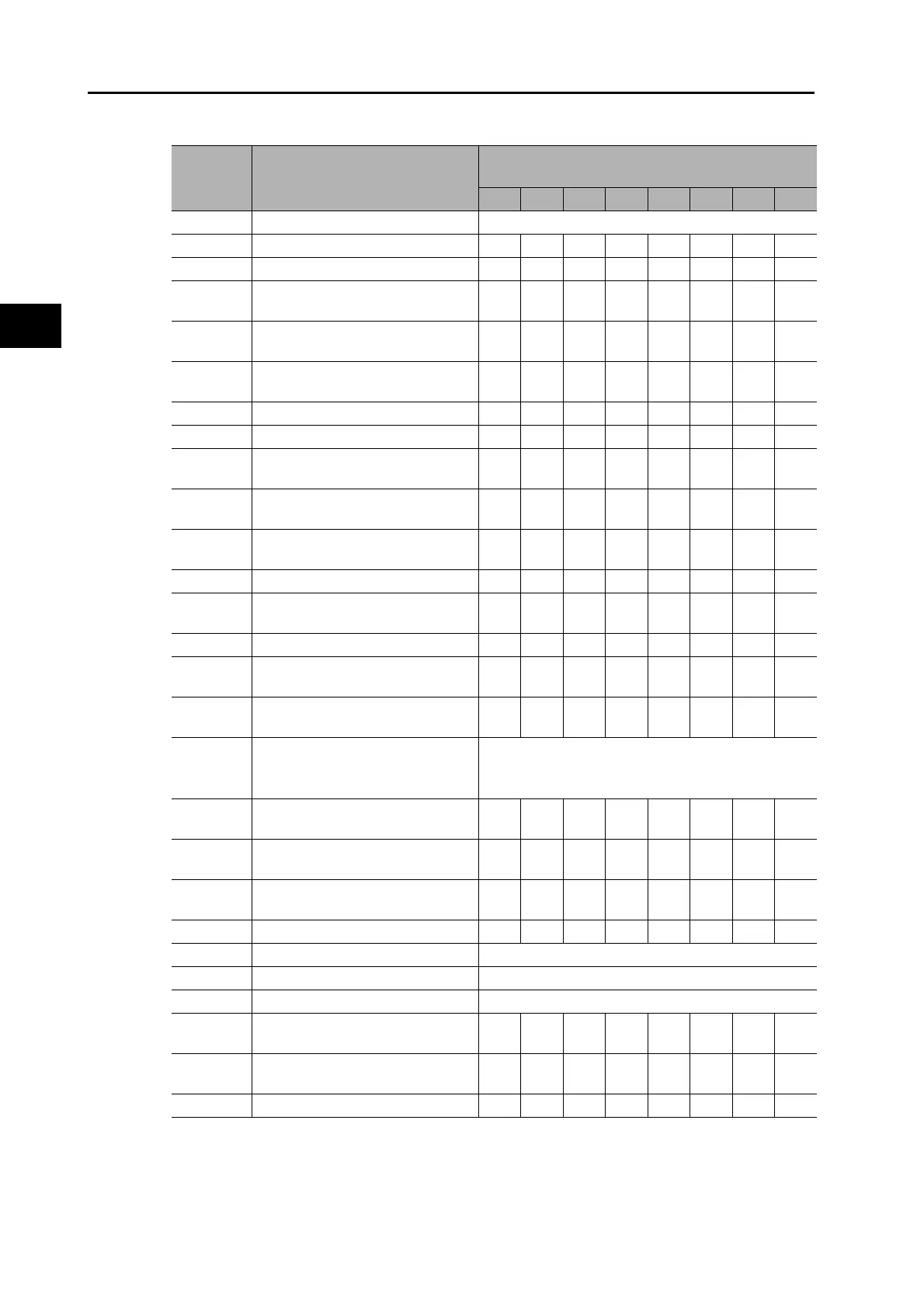
Realtime Autotuning (RTAT) Object Table
*1. This is limited to a minimum value of 10 if a 17-bit absolute encoder is used.
Index Name
AT Machine Rigidity Setting (3003 hex)
0 1 2 3 4 5 6 7
3004 hex Inertia Ratio Estimated load inertia ratio
3100 hexPosition Loop Gain 1 2025304045557595
3101 hex Speed Loop Gain 1 15 20 25 30 35 45 60 75
3102 hex
Speed Loop Integral Time Constant
1
3700 2800 2200 1900 1600 1200 900 700
3103 hex
Speed Feedback Filter Time
Constant 1
00000000
3104 hex
Torque Command Filter Time
Constant 1
*1
1500 1100 900 800 600 500 400 300
3105 hex Position Loop Gain 2 25 30 40 45 55 70 95 120
3106 hex Speed Loop Gain 2 15 20 25 30 35 45 60 75
3107 hex
Speed Loop Integral Time Constant
2
10000 10000 10000 10000 10000 10000 10000 10000
3108 hex
Speed Feedback Filter Time
Constant 2
00000000
3109 hex
Torque Command Filter Time
Constant 2
*1
1500 1100 900 800 600 500 400 300
3110 hex Speed Feed-forward Gain 300 300 300 300 300 300 300 300
3111 hex
Speed Feed-forward Command
Filter
50 50 50 50 50 50 50 50
3112 hexTorque Feed-forward Gain 00000000
3113 hex
Torque Feed-forward Command
Filter
00000000
3114 hex
Gain Switching Input Operating
Mode Selection
11111111
3115 hex Switching Mode in Position Control
Gain Switching Enable Mode: 10
Gain Switching Disable Mode: 0
3116 hex
Gain Switching Delay Time in
Position Control
30 30 30 30 30 30 30 30
3117 hex
Gain Switching Level in Position
Control
50 50 50 50 50 50 50 50
3118 hex
Gain Switching Hysteresis in
Position Control
33 33 33 33 33 33 33 33
3119 hex Position Gain Switching Time 33 33 33 33 33 33 33 33
3607 hex Torque Command Value Offset Estimated if object 3002 hex = 3.
3608 hex Forward Direction Torque Offset Estimated if object 3002 hex = 4.
3609 hex Reverse Direction Torque Offset Estimated if object 3002 hex = 4.
3610 hex.0,
3610 hex.1
Function Expansion Setting 00000000
3623 hex
Disturbance Torque Compensation
Gain
00000000
3624 hexDisturbance Observer Filter Setting00000000
 Loading...
Loading...