Parker Hannifin
Binary CLR
Data Type Description
Byte 0 Header ID ( 0x1D )
Byte 1 Index Byte 0
Byte 2 Index Byte 1
Byte 3 0x00, this byte is for
ACR8020 DPCB only.
Usage Example
Binary Output Description
1C 08 02
Set bit 520 ( 0x0208 )
1D 20 00
Clear bit 32 ( 0x0010 )
Binary FOV Command
The immediate setting of feedrate override for any or all axes can
be accomplished with an 8-byte binary command sequence. This
sequence is a 4-byte command header followed by a 4-byte FOV
value. The command is not queued and the FOV occurs when the
command is first seen by the board.
The second byte in the header is a bit mask that determines which
masters are affected by the FOV value that follows. The FOV value is
an image of an IEEE 32-bit floating-point value, sent low order byte
first.
For more than eight masters the header bit mask Byte 1 should be
set zero, and then the two optional 16 master header bit mask Byte
2 and Byte 3 should be filled accordingly.
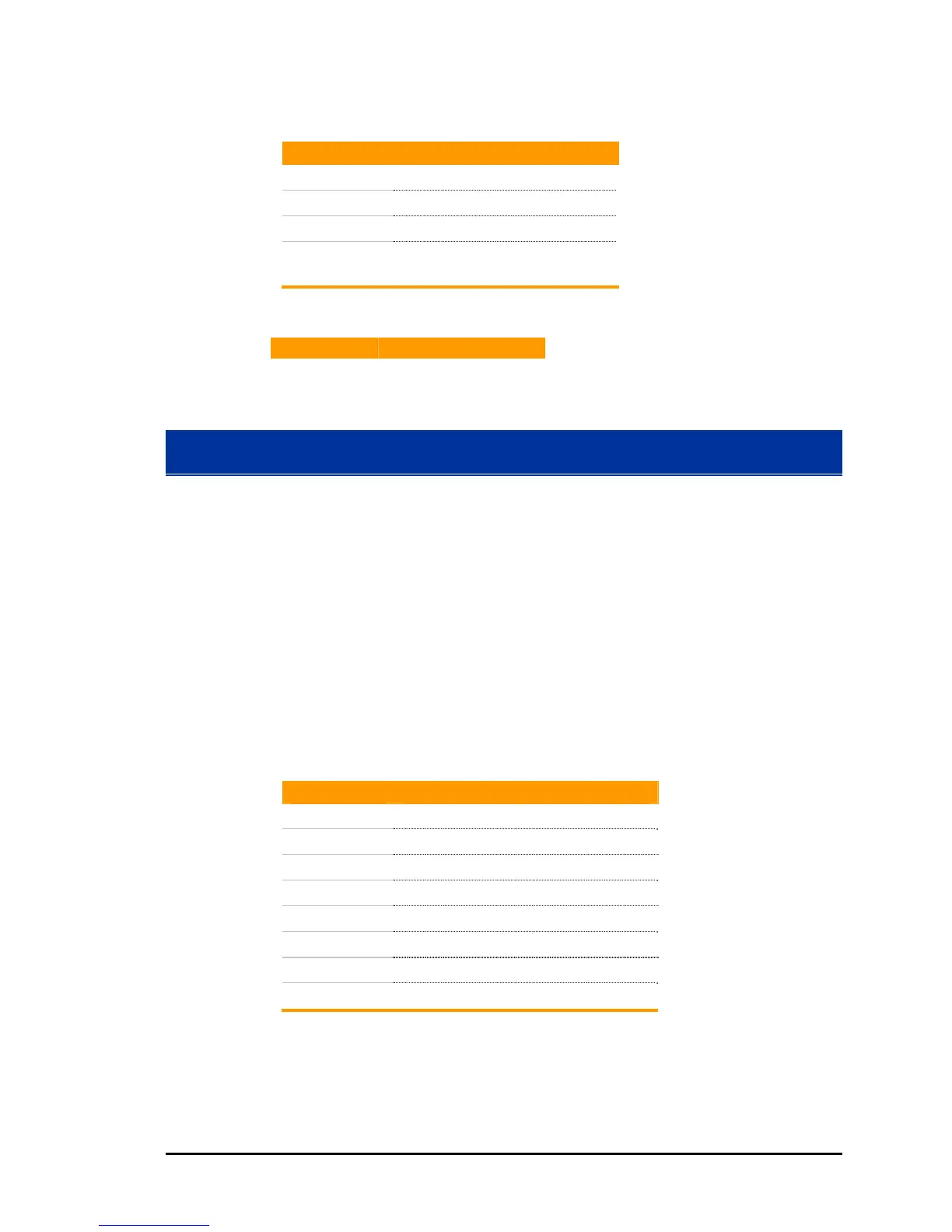
Binary Format
Data Type Description
Byte 0 Header ID ( 0x07 )
Byte 1 Header Bit Mask
Byte 2 16 Master Header Bit Mask, Part 1
Byte 3 16 Master Header Bit Mask, Part 2
Byte 4 FOV Byte 0
Byte 5 FOV Byte 1
Byte 6 FOV Byte 2
Byte 7 FOV Byte 3
Binary Host Interface 121

 Loading...
Loading...








