Parker Hannifin
Inverse Kinematics
Kinematics is a branch of mechanics that provides a mathematical
means of describing motion. Inverse kinematics looks at a position
and works backwards to determine the motions necessary to obtain
that position.
Robotic applications frequently use inverse kinematics. Algorithms
describe the mechanical system, and translate the rotational motion
of robotics into Cartesian coordinates. Consequently, an end user
provides simple Cartesian coordinates for an application, and the
inverse kinematics calculates necessary movements to reach that
position.
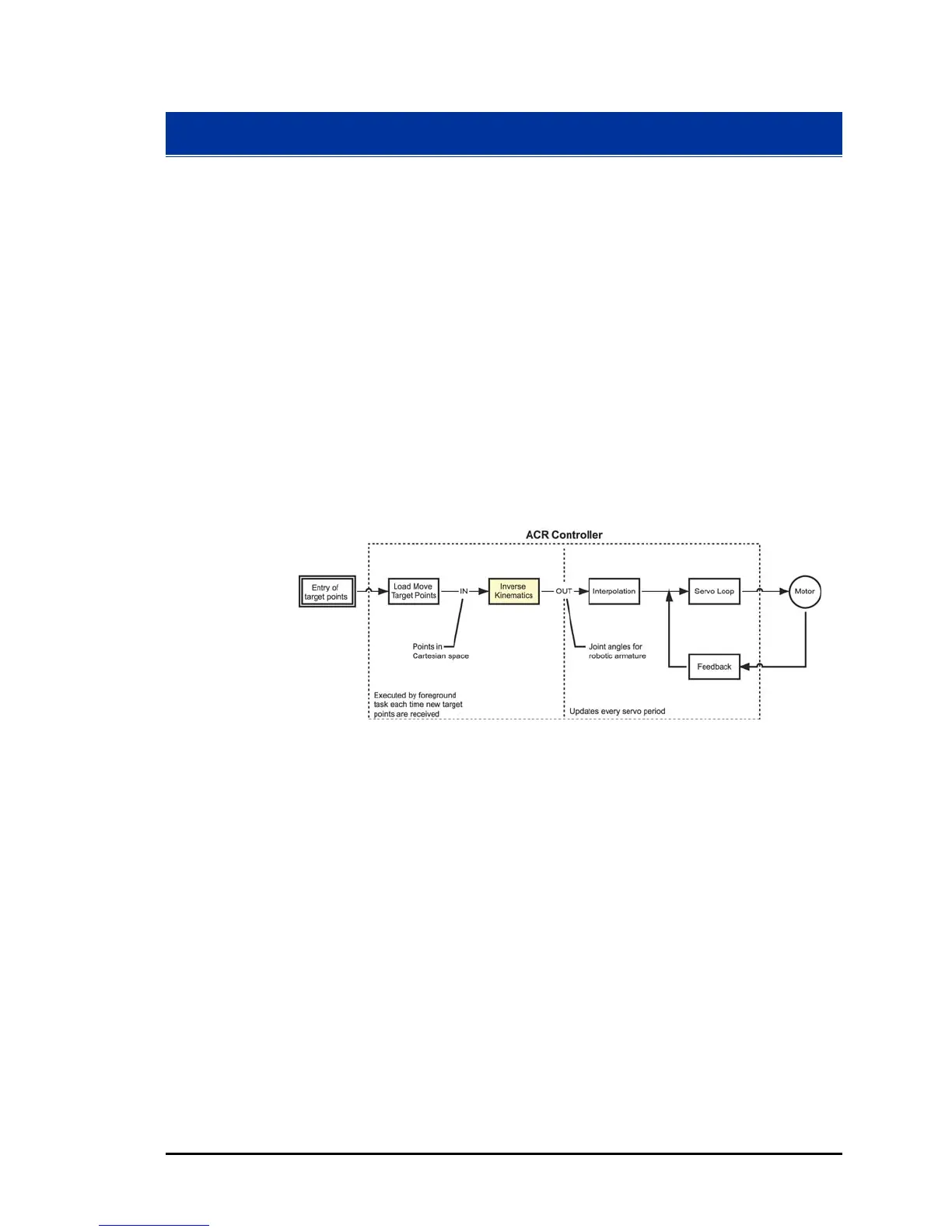
Suppose an application has a cutting tool at the end of a 4-axis
robotic arm, and an HMI. The controller, using algorithms developed
by the application builder, transforms the motion target-points from
Cartesian coordinates to rotational coordinates to position the arm
joints and cutting tool. Once transformed, the controller interpolates
the target points to generate a motion path. See the illustration
below:
Programming the Inverse Kinematics
Each application is different. The algorithm for your application can
consist of equations, logical expressions, and commands in the
AcroBASIC language. You can do the following:
• Store algorithms in any of the programs 0 through 15 (be sure
to dimension memory for the program).
• Save the program to Flash memory.
• Use the PASSWORD command to protect the program from
uploading or listing.
• Include the INVK commands in a program, or in the setup
before a program.
Additional Features 147
 Loading...
Loading...










