Parker Hannifin
Servo Loop Fundamentals
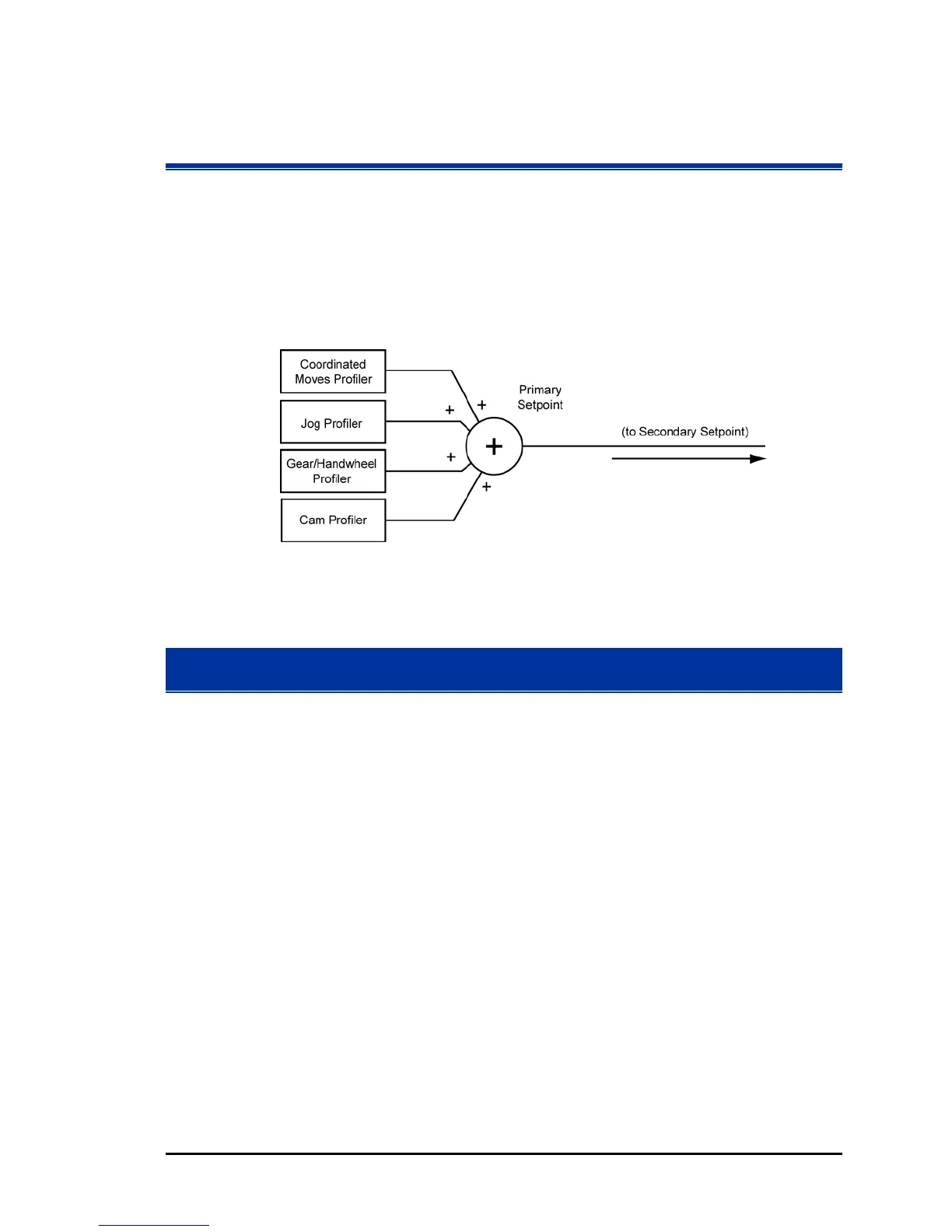
Each of the profilers contains a register with a value of the current
offset. These values are added together and the summation is
called the Primary Setpoint (PSP).
PSP = Coordinated Moves + Jog + Gear + Cam
See Figure 15 for a diagram of the Primary Setpoint summation.
Figure 15 Primary Setpoint Summation
Setpoint Compensation
There are two mechanical characteristics that the controller takes
into consideration and compensates for: hysteresis losses and non-
linear position error, which are processed by the Backlash Generator
and Ballscrew Profiler, respectively.
• Backlash Generator: Used to compensate for error introduced
by hysteresis in mechanical gearboxes. Backlash is used in the
Secondary Setpoint summation if the Primary Setpoint value is
positive. (Use the BKL command—Set Backlash
Compensation—to set the compensation, or, without an
argument, to display the current setting for an axis.)
• Ballscrew Profiler: Used to compensate for non-linear position
error introduced by mechanical ballscrews and gearboxes.
(Use the BSC command—Ballscrew Compensation— to initialize
and control ballscrew compensation for an axis.)
The values of the Backlash Generator and Ballscrew Profiler are
added to the Primary Setpoint, and this summation is called the
Secondary Setpoint (SSP).
SSP = PSP + Backlash + Ballscrew
Servo Loop Fundamentals 87

 Loading...
Loading...








