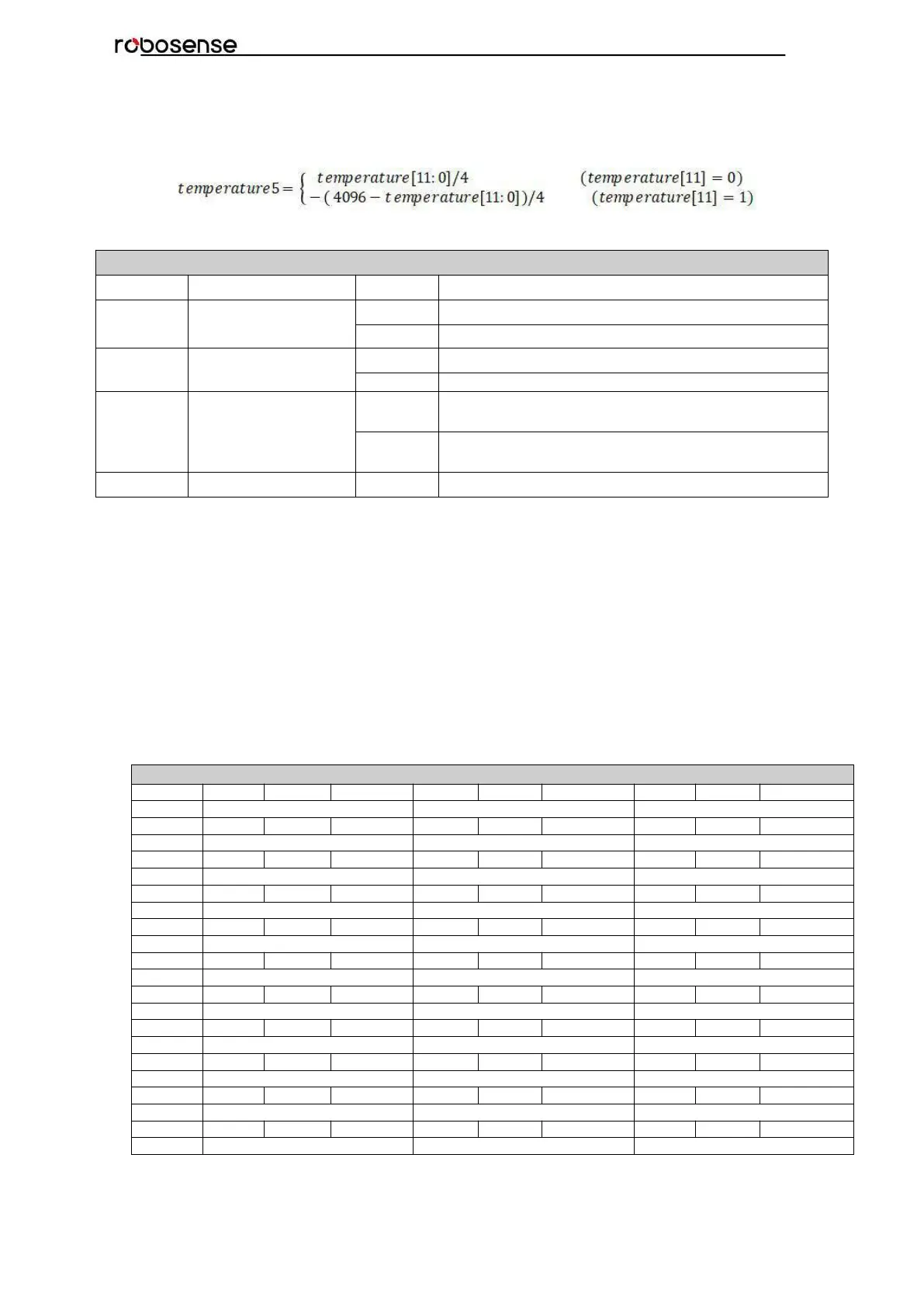
Temperature5 represents bottom board temperature. The temperature register contains 2
bytes to be temperature_reg[15:0]. temperature_reg[15:12] is invalid.
temperature_reg[11:0] is temperature value, while temperature_reg[15] is symbol flag.
(4) Byte16 represents the GPS input status register gps_st, this register uses 3 bits to
describe the validation for PPS, GPRMC, and timestamp. The details are shown below:
GPS input status register GPS_ST
LiDAR internal timestamp is not synchronizing the
UTC.
LiDAR internal timestamp is synchronizing the
UTC.
(1) The real-time rotation speed of the motor is composed of two bytes, byte32 and
byte33. The calculation formula is as follows:
Motor real-time rotation speed = (256 * r_rpm1 + r_rpm2)÷6
(2) The reset is used for internal debug, they are not opened.
B.12 ASCII code in GPRMC Packet
GPRMC register reserve 86 bytes, it can store the whole GPRMC message from GPS
module in to the register in ASCII code.
B.13 Corrected Vertical Angle (COR_VERT_ANG)
Corrected Vertical Angle(96bytes in total)